

Conocimientos sobre los sensores ultrasónicos (parte 3): Diversos modos de funcionamiento

Los sensores ultrasónicos se pueden usar con diversos modos de funcionamiento para obtener los mejores resultados de detección en diversas aplicaciones. Pepperl+Fuchs proporciona información útil sobre las posibles configuraciones.
Los sensores ultrasónicos de Pepperl+Fuchs determinan la distancia hasta un objeto mediante el método de tiempo de tránsito de eco. La distancia medida se puede evaluar y mostrar de diferentes formas. La distancia hasta el objeto se convierte en un valor analógico y se muestra en la salida analógica (por ejemplo, 0-10 V, 4-20 mA) del sensor ultrasónico. De manera alternativa, es posible que la distancia hasta el objeto se transmita directamente a un controlador como un valor digital mediante una interfaz especial, como IO-Link.
En los sensores ultrasónicos con salidas de conmutación, el estado de la salida cambia cuando se detecta un objeto en el rango de conmutación establecido. Se establece una distinción entre las funciones NA y NC , según la respuesta hacia el objeto.
En los sensores con salidas de conmutación, se pueden configurar diversos modos operativos mediante una configuración y parametrización adecuadas.
Sensores fotoeléctricos de detección directa
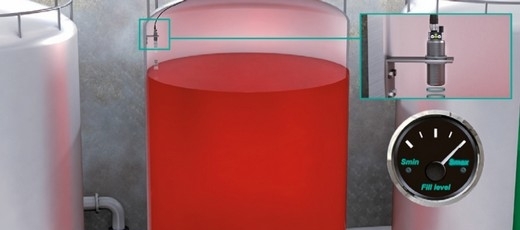
Medición del nivel de un depósito con un sensor ultrasónico en el modo de detección directa
Los sensores ultrasónicos se usan con mayor frecuencia en el modo de detección directa. El emisor y el receptor se encuentran en la misma carcasa. El objetivo actúa como un reflector del sonido.
Características
- Instalación sencilla con solo un cabezal de sensor
- Es posible la supresión en primer o segundo plano (modo de intervalo)
- El objeto actúa como reflector y la alineación es importante
- La frecuencia de conmutación es inferior en comparación con el sensor fotoeléctrico de barrera unidireccional
Sensores ópticos de barrera por reflexión

Detección fiable de un objeto inclinado sobre una cinta transportadora con un sensor ultrasónico en el modo de barrera por reflexión
En el modo de barrera por reflexión, un reflector instalado de manera permanente refleja constantemente la señal ultrasónica. Se puede usar un panel de plástico o metal alineado como reflector. También se puede utilizar un fondo existente, como, por ejemplo, una pared, una cinta transportadora o el propio suelo. Siempre que no haya un objeto entre el sensor ultrasónico y el reflector de referencia, el sensor recibirá un eco constante procedente del reflector. Si un objeto detectado se cruza en el rango de detección, la reflexión de la señal ultrasónica cambia y el sensor ultrasónico detecta la presencia del objeto. En general, la conmutación se activa en los tres casos que se indican a continuación.
- El sensor detecta un objeto pequeño que se encuentra delante del reflector de referencia. El sensor ultrasónico recibe un eco adicional procedente del reflector de referencia.
- Se detecta un objeto grande que cubre el reflector de referencia. El sensor ultrasónico solo recibe un eco procedente del objeto.
- Hay un objeto grande e inclinado enfrente del reflector de referencia y, aunque no se ha detectado, cubre el reflector. El sensor ultrasónico no recibe ningún eco del objeto ni del sensor de referencia.
Estos tres casos activan la conmutación en la salida del sensor ultrasónico. Los sensores ópticos de barrera por reflexión están recomendados especialmente para la detección fiable de objetos que absorben el sonido. También son adecuados para objetos cuyas superficies no se detectan con facilidad, como superficies uniformes e inclinadas (por ejemplo, el parabrisas de un coche). En este modo de funcionamiento no hay puntos ciegos.
Características
- Instalación sencilla con solo un cabezal de sensor
- Detecta objetos difíciles de manera fiable (superficies inclinadas, materiales que absorben el sonido)
- El fondo o material de referencia se usa como un reflector fijo; el objeto interrumpe o rompe el haz
- La frecuencia de conmutación es inferior en comparación con el sensor fotoeléctrico de barrera unidireccional
Sensores fotoeléctricos de barrera unidireccionales

Para contar botellas es necesaria una alta frecuencia de conmutación. Los sensores ultrasónicos en el modo de barrera unidireccional constituyen una solución idónea para estos casos.
Los sensores ultrasónicos de un haz usan transductores específicos como emisor y receptor que se encuentran en dos carcasas diferentes. El sistema electrónico de evaluación y las salidas se ubican junto al receptor. Los sensores ultrasónicos se instalan en direcciones opuestas sobre un eje común. Si un objeto interrumpe el haz de sonido, se activa la salida de conmutación del sensor. La sensibilidad del receptor se puede configurar normalmente mediante (la función de aprendizaje o el potenciómetro) para intervalos diferentes entre el emisor y el receptor o para objetos de diferente tamaño. Este modo es extremadamente resistente a perturbaciones externas. Además, duplica el rango y permite que el objeto se detecte a distancias significativamente mayores. La frecuencia de conmutación es bastante más rápida, ya que el sensor ultrasónico no tiene que alternar continuamente entre los modos de transmisión y recepción.
Características
- Se deben instalar y conectar dos cabezales de sensor
- Amplio rango: es posible que haya una gran distancia entre el emisor y el receptor
- Detecta objetos difíciles de manera fiable (superficies inclinadas, materiales que absorben el sonido)
- Frecuencia de conmutación muy elevada, características de respuesta definidas
Descargas en PDF: Guías tecnológicas de sensores ultrasónicos

Pepperl+Fuchs le ofrece distintos documentos descargables con conocimientos sobre los sensores ultrasónicos. Además de una guía tecnológica general sobre los sensores ultrasónicos, ahora puede descargar una nueva guía sobre la detección de material doble con los sensores ultrasónicos. Obtenga sus documentos PDF gratis y benefíciese de información y consejos valiosos para su trabajo diario en campo.

Pepperl+Fuchs le ofrece distintos documentos descargables con información sobre los sensores ultrasónicos.
- Conocimientos sobre los sensores ultrasónicos (Parte 1): Tecnología y funcionalidad en unas pocas palabras
- Conocimientos sobre los sensores ultrasónicos (Parte 2): Influencias en el haz de sonido
- Conocimientos sobre los sensores ultrasónicos (parte 3): Diversos modos de funcionamiento
- Conocimientos sobre los sensores ultrasónicos (parte 4): Influencia en la precisión de la medición
- Conocimientos sobre los sensores ultrasónicos (Parte 5): Instalación y montaje fácil
- Conocimiento de Sensores Ultrasónicos (Part. 6): Sincronización de Sensores Ultrasónicos


Pepperl+Fuchs SE
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
Pepperl + Fuchs es líder en el desarrollo y la fabricación de sensores electrónicos y componentes para el mercado de la automatización global. Su incesante innovación, calidad duradera y crecimiento constante garantizan el éxito continuado, desde hace más de 70 años. Pepperl + Fuchs emplea a 6.300 personas en todo el mundo y cuenta con fábricas en Alemania, EE.UU., Singapur, Hungría, Indonesia y Vietnam, la mayoría de ellas con certificado ISO 9001.