




Nye allsidige applikasjoner
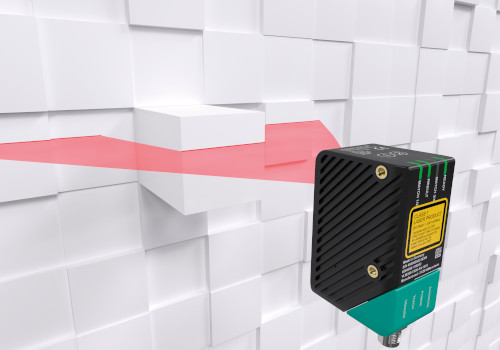
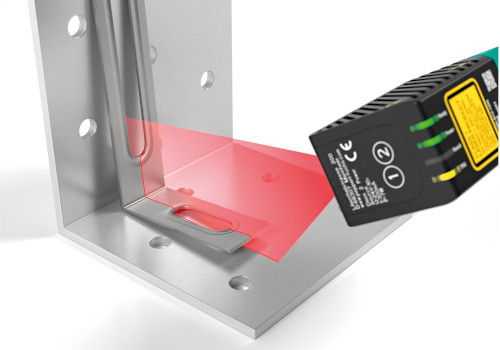
SmartRunner-teknologi er en unik kombinasjon av lyssnittsensorteknologi og en 2-D vision-sensor med integrerte LED-er. Denne nyskapende kombinasjonen gir helt nye applikasjoner for krevende overvåkingsoppgaver og lar deg designe effektive, fremtidssikre prosesser.




 Ytterligere informasjon
Ytterligere informasjon

 +47 3557 3800
+47 3557 3800