




Nya användningsområden
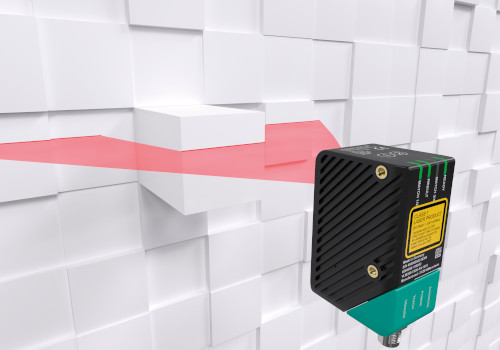
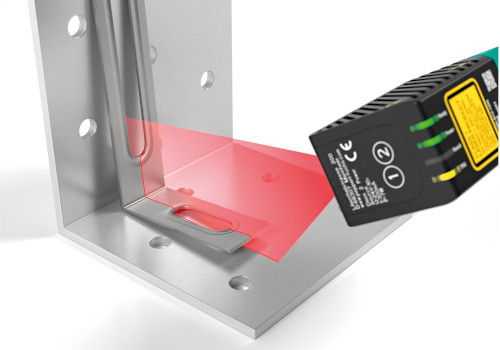
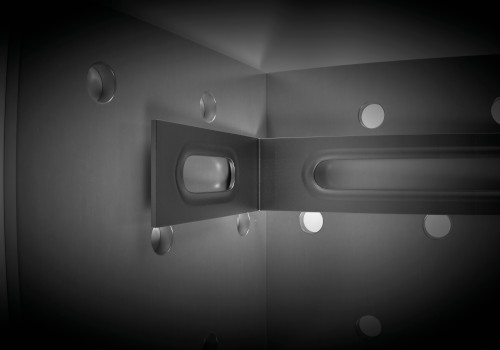
SmartRunner-tekniken är en unik kombination av profilmätningsteknik och en 2D-visionssensor med inbyggda lysdioder. Den här innovativa kombinationen ger helt nya användningsmöjligheter vid krävande detekteringsuppgifter och gör det möjligt att skapa effektiva och framtidssäkra processer.




 Ytterligare information
Ytterligare information

 +46 303 246070
+46 303 246070