多才な新しいアプリケーション
SmartRunnerは光切断法と2-Dビジョンセンサを組み合わせた技術を採用しています。これは、全く新しい検出タスクのアプリケーションです。先進的な設計を効率的に進めることが可能になるでしょう。


Analyzing needs.
Reinventing technology.
Simplifying solutions.
SmartRunnerテクノロジーを用いた光切断センサ
They create space for completely new application possibilities: The sensors of the SmartRunner family combine the powerful laser light section method with 2-D vision technology in just one device and therefore master all tasks in the field of profile detection and inspection. The laser profile sensors are each optimized for a specific application area—the “Matcher” stands for reliable profile comparisons, the “Detector” for precise area monitoring and the “Explorer” for height profile output.
Get to know the sensors of the SmartRunner product family and find the right laser profile sensor for your individual application!
A sensor for every application: With the laser light section technology, the sensors of the SmartRunner series master numerous tasks in the field of industrial vision:




SmartRunnerは、全く新しい検出タスクのアプリケーション向けのテクノロジーです。先進的な設計を効率的に進めることが可能になるでしょう。SmartRunner製品ファミリー:SmartRunner Detector とSmartRunner Matcherをお勧めします。
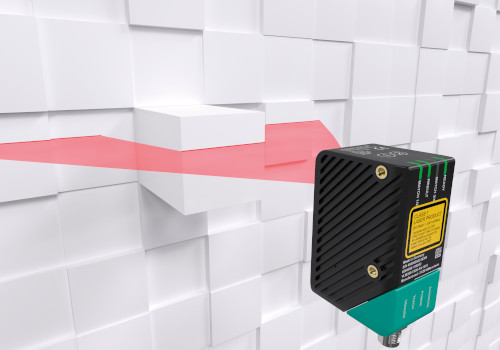
The SmartRunner Explorer offers the unique combination of height profile and 2-D image output in one compact sensor. Using laser light section technology, the sensor reliably detects the height profile of an object—regardless of the surface and lighting conditions. It then provides the raw data of the height profile so that the user can process it individually. As a unique feature, the SmartRunner Explorer additionally outputs 2-D surface images, simplifying diagnosis and documentation of line data.
The laser profile sensor can be easily integrated into PC programs via Ethernet TCP/IP and the supplied DLL for C# or alternatively via C and Python wrappers. The GenICam and ROS interfaces also enable universal access to data and parameters as well as to a variety of programming modules from software libraries. This saves users time and money when implementing individual applications.
Typical Applications:
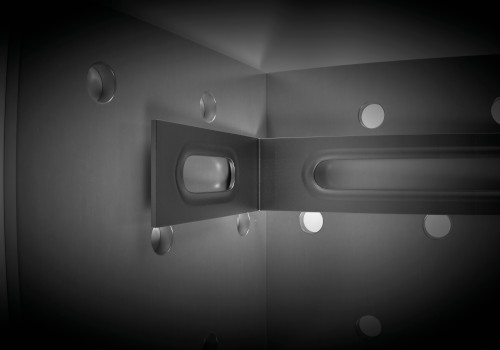
The SmartRunner Matcher ensures reliable profile comparisons at all times, regardless of surface condition, lighting or ambient light—even with particularly low-contrast objects. To do this, the sensor verifies the detected profile, the correct position and the optimum distance of an object and compares the detected profile with the previously taught reference profile via trigger. The integrated evaluation unit is programmed to report deviations from the reference profile, so that the sensor outputs a “good” or “bad” signal depending on whether the profiles are identical or different.
The sensor can be commissioned quickly and easily: via the Vision Configurator, by DataMatrix control code or by guided operation and parameterization with the software wizard, which enables step-by-step configuration without a manual. In addition, the user can freely define the object and displacement tolerances and output position data separately. The SmartRunner Matcher therefore offers the optimal solution for robust and cost-efficient presence, completeness and position detection of components.
Typical Applications:
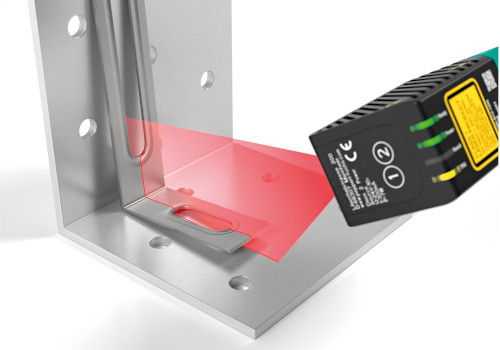
The SmartRunner Detector offers the optimal solution for high-precision monitoring tasks. Whether highly reflective, transparent or absorbent surfaces—due to the additional background evaluation, the sensor reliably detects even objects that are not recognizable at first glance. The sensor responds immediately to interfering objects in the detection range due to the interrupted background line, therefore ensuring the user absolute process reliablility.
The SmartRunner Detector can be easily parameterized via DataMatrix control codes, via the parameterization software or via plug-and-play. The laser line just only has to be aligned to a fixed background such as a wall and taught in. Alternatively, teach-in can also be performed via keystroke or via the parameterization software in an empty room. In addition, the SmartRunner Detector offers the option of freely defining object sizes in a specific monitoring area, the so-called region of interest (ROI), in order to avoid false alarms caused by external influences.
Typical Applications:
SmartRunner製品ファミリーに関するご質問、詳しい情報については、下記のフォームに入力、メッセージをご記入してお送りください。


株式会社 ピーアンドエフ
〒220-0022
神奈川県横浜市西区花咲町6-145
横浜花咲ビル5F 日本
日本
sales@jp.pepperl-fuchs.com
 +81 45 6249077
+81 45 6249077
株式会社ピーアンドエフ
大阪府豊中市新千里東町1-5-3
千里朝日阪急ビル15階
〒560-0082 大阪
日本
sales@jp.pepperl-fuchs.com
+81 6 6836-5620



 詳しい情報
詳しい情報