

R2000 系列二维激光扫描仪的软硬件功能特点

无论是用于仓库、机器人还是自动导引车 (AGV) 的动态导航,R2000 系列 2-D LiDAR 传感器都具有 360° 全方位的视野。这款精密的激光扫描仪采用创新的脉冲测距技术 (PRT),提供可靠精确的测量结果。本文将带你详细了解 R2000 的软硬件功能,以及如何通过 R2000 来解决您的应用难题。
软件特点
扫描数据过滤
R2000 增加了扫描数据过滤的预处理功能,减少了扫描的数据量,同时依然使用高扫描分辨率,从而提供更高的数据输出性能。
扫描数据过滤,通过将可配置的 N 个相邻的扫描点(窗口大小)组合成单个扫描点(逐块处理),这是预定义的多个算法中的一种。过滤算法根据输入的数据来计算距离值和幅值,形成的扫描点被放置在角度和时间戳处理窗口的中心,所有操作都在传感器的坐标系中进行。
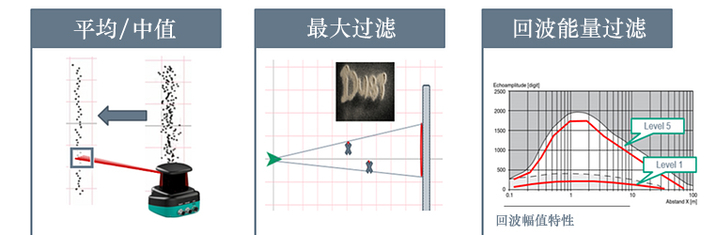
用户可以选择四种不同的过滤方式进行预处理,包括平均/中值过滤、最大过滤和回波能量过滤。平均/中值过滤用于噪音程度很低的场景,以实现更高的测量精度。最大过滤能够降低灰尘和近场微小物体(比如雨滴)对测量的干扰,确保在户外和恶劣环境中的可靠运行。回波能量过滤可以区分测量反射板和自然目标,从而抑制低反射目标。
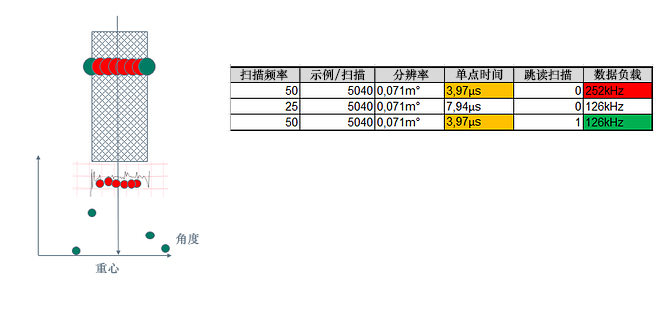
跳读扫描功能
与全局参数扫描频率定义的扫描记录频率相比,跳读扫描功能能够通过扫描数据的连接来降低扫描的输出频率,每进行一次的扫描数据传输,下一次的数据输出会被抑制。这一功能对部分需要高频率扫描的应用非常有用,可以降低动态环境中(例如 AGV)记录扫描数据的运动模糊效应。
硬件特点
硬件时间戳
硬件时间戳能够提供高精度的同步传感器原始系统与外部客户端系统的时间。这样就消除了通过以太网进行软件同步所造成的时间延迟和抖动,实现了小于 1 ms 的同步精度。它还提高了自动导引车导航时的位置精度。
输入/输出访问
此功能允许命令访问两个 I/Q 通道,这些通道可用作数字输入或数字输出。这为扫描仪的外围硬件提供便捷支持,让受限的 I/Q 客户端控制器受益。
镜头污染监测器
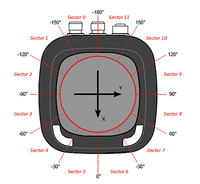
将扫描仪镜头以 30° 分为十二个扇区
镜头污染监测器 (LCM) 能够持续监测扫描仪镜头的透明度和污染状况。当透明度低于预定义的水平时,扫描仪会发出警告,在镜头可视范围缩小前清洁镜头。警告等级可以设为三个不同的级别——低、中和高灵敏度。镜头以 30° 分为十二个扇区,每个扇区的 LCM 都可单独激活。


台灣倍加福有限公司
信義路5段150巷2號21樓之4
信義區
11059 台北市 臺灣
臺灣
fa-info@tw.pepperl-fuchs.com
 +886 2 27227708
+886 2 27227708
Pepperl+Fuchs 倍加福是領先全球的電子感測器 和 零組件的開發與製造商. 超過七十年的不斷創新、穩定的品質與持續的業績增長,成就了今日的我們, Pepperl+Fuchs 倍加福在全球擁有 6,300 名員工,並在德國、美國、新加坡、匈牙利、印尼和越南都設有製造工廠,其中多數工廠已通過 ISO 9001 認證