

Ángulos de viraje, inclinación y aceleración para el control de AGV
Detección de posición dinámica con unidad de medición inercial precisa
La aplicación
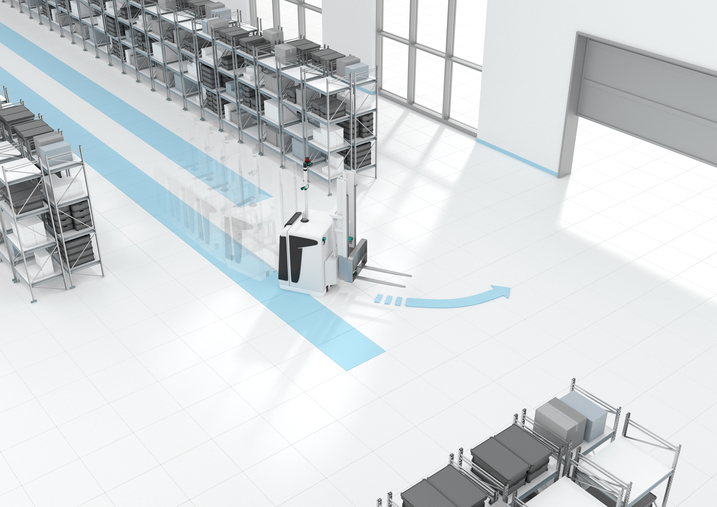
Los vehículos de guiado automático (AGV) tienen cada vez más presencia en la logística de procesos de fabricación y almacenes. Se encargan del transporte de piezas y productos entre las distintas estaciones y áreas de procesamiento. Su navegación precisa es un requisito fundamental para que los procesos sean fluidos. Por regla general, se utilizan varios sensores por vehículo para este fin, de forma que la detección de la posición exacta esté siempre disponible para curvas y maniobras evasivas.
El objetivo
Los materiales de transporte deben alcanzar su objetivo lo antes posible; se debe localizar el objetivo y llegar a él de un modo fiable. Al navegar por la ruta de transporte, se requiere flexibilidad para poder reaccionar a los obstáculos y cambios en el entorno. El AGV tiene que ser capaz de permanecer con precisión en la vía especificada por el controlador al desplazarse en línea recta o en curvas. Esto requiere que los sensores controlen automáticamente con precisión la posición del vehículo.
The Solution
Inertial Measurement Unit F99
Optical sensors are normally used for general navigation in the environment. However, the AGV requires additional data to precisely determine its position at all times. Aligning two systems offsets measuring tolerances and small deviations. The inertial measurement unit F99 detects any deviation from the straight-line movement with high accuracy by measuring the Coriolis force with a capacitive MEMS sensor. It outputs the rotation rate values (°/sec) of the corners driven by the vehicle, thereby providing the additional data required for dynamic position detection and precise navigation.
Technical Features
- Inclination, acceleration, and rotation rate measurement along three axes
- IP68/69 degree of protection
- Parameterizable via interface
- Output formats and values can be selected
- Suitable for dynamic applications
- CAN bus with SAE J1939 protocol
- Increased EMC resistance

Las ventajas
Además de la velocidad de rotación, la IMU F99 también suministra un valor de inclinación para detectar la posición horizontal del vehículo en el espacio, así como valores de aceleración en tres ejes. Estos valores sirven como fuente adicional de información para el controlador AGV. Se puede utilizar un valor de ángulo de dirección máximo definido para evitar que el vehículo vuelque al tomar una curva. Un sofisticado concepto de montaje ofrece una gran flexibilidad para colocar el sensor en el AGV. Con su resistente carcasa y su grado de protección IP68/69, es adecuado para su uso en exteriores y en entornos hostiles. La velocidad de rotación se mide sin contacto y sin objetivo. El dispositivo no necesita un eje mecánico de rotación ni cojinetes de bolas, por lo que no requiere mantenimiento durante mucho tiempo.
Características principales
- Valores de ángulo precisos en las curvas mediante la medición capacitiva de la fuerza de Coriolis
- Valor de inclinación exacto para detectar la posición horizontal del vehículo en el emplazamiento
- Valores de aceleración precisos en tres ejes
- Medición sin contacto de la velocidad de rotación sin objetivo y sin desgaste mecánico
- Carcasa resistente y alto grado de protección para su uso en exteriores y en entornos hostiles

Los vehículos de guiado automático se han convertido en un componente indispensable en los procesos modernos de manipulación de materiales. Descubra nuestros sensores y soluciones para la manipulación de cargas, la navegación y el guiado, y el reconocimiento del entorno.


Pepperl+Fuchs SE
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
Pepperl + Fuchs es líder en el desarrollo y la fabricación de sensores electrónicos y componentes para el mercado de la automatización global. Su incesante innovación, calidad duradera y crecimiento constante garantizan el éxito continuado, desde hace más de 70 años. Pepperl + Fuchs emplea a 6.300 personas en todo el mundo y cuenta con fábricas en Alemania, EE.UU., Singapur, Hungría, Indonesia y Vietnam, la mayoría de ellas con certificado ISO 9001.