

使用惯性测量单元 IMU F99 监测动态应用中的倾角和加速度
在动态应用中,当倾角和加速度测量值因外部加速度失真时,可以使用惯性测量单元 F99 作为理想解决方案。通过将加速度传感器、陀螺仪和智能传感器融合算法结合在一个产品单元中,惯性测量单元 (IMU)通过补偿动态运动,确保精确的倾角测量。IMU F99 具有 IP68/IP69K 高防护等级,专为户外应用设计,并通过 E1 认证,可用于公共道路应用,以实现多样化的行业应用。以下是使用惯性测量单元 IMU F99 进行倾角和加速度监测的六个应用案例。

可靠的车载秤倾角监测
车载称重系统用于计算移动设备上物料的重量。例如,现代轮式装载机直接计算装载在铲斗中的物料重量。因此,不再需要前往集中称重位置。为了避免由于外部加速度导致的错误结果,可以使用惯性测量单元 F99。通过 IMU F99 提供加速度补偿数据,确保进行精确的重量计算,而不会浪费时间。

IMU F99 为车载称重系统提供加速度补偿数据,并确保实时准确的重量计算。
大型车辆的转向角限制
IMU F99 非常适用于轮式装载机、装卸车或叉车等大型车辆上进行倾角测量,避免损坏设备或伤害工作人员。如果这些机器在不平坦的区域中使用,在斜坡位置的转向角过大可能会导致车辆发生倾翻。为了防止这种情况,即使在启动或制动等外部加速期间,IMU F99 也能可靠地检测倾斜角度,调节车辆的转向角防止倾翻。
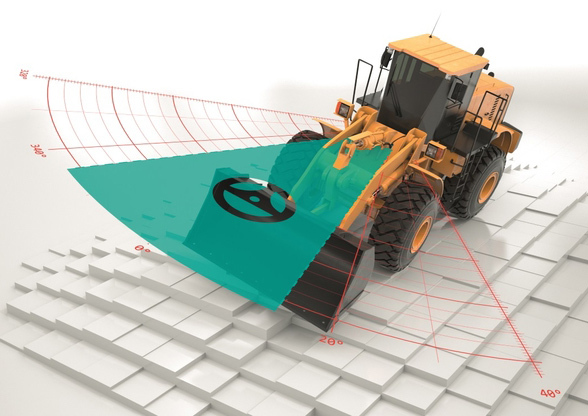
即使在启动或制动等外部加速期间,IMU F99 也能可靠地检测倾斜角度。
挖掘机铲斗的精确定位
在挖掘工作期间,挖掘机操作员可以接收有关挖掘工作的精确信息,例如外部尺寸和深度,并且在显示屏上看到机器实际运动的图像。操作人员按照这些指示移动铲斗。为了精确定位铲斗,必须始终记录确切的位置,即使在移动过程中也是如此。将 IMU F99 安装在铰接臂、铲斗和底盘的每个运动部件上。通过这些设备测量加速度和转速,并用该数据计算运动部件的动态角度。此外,在挖掘机移动时,还记录了铲尖相对地球中心的绝对位置。通过外部 GPS 数据,可实现挖掘机铲斗的全球绝对位置测量。

IMU F99 通过计算铰接臂、铲斗和底盘的运动部件的动态角度,确保挖掘机铲斗的精确定位。
农业机械中的悬臂倾角控制
在农业中,通常会使用带有长悬臂的机器进行喷洒液体肥料和农药。影响肥料和农药有效分布的一个方面是悬臂和地面之间的距离。理想情况下,它将该距离应始终保持在最小公差范围内。IMU F99 可以测量加速度和转速,并将计算出的悬臂动态倾斜角度传输至控制系统。

通过 IMU F99 测量悬臂和地面之间的距离,并确保悬臂高度保持在合适的喷洒位置。
风力涡轮机的可靠监测
为了确保风力涡轮机的安全高效运行,通常使用多种传感器监测塔架振动、轮毂位置和转速以及转子叶片的扭矩和结冰。惯性测量单元F99能够可靠实现所有的这些任务,并满足风力涡轮机运行的特殊要求。同一类型的传感器设备可以减少资产管理的工作量——通过 IMU F99 可靠监测设备部件。
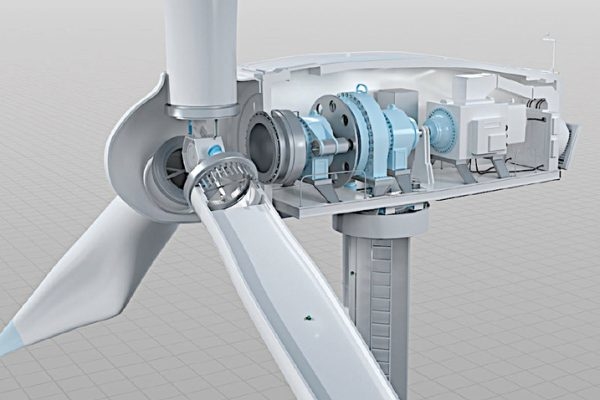
IMU F99 可靠地监测风力涡轮机的设备部件,如塔架振动、轮毂的位置和转速,以及转子叶片的扭矩和结冰。
AGV 的动态位置检测
自动导引车辆 AGV 越来越多地用于在不同工位之间运输零件和产品。普通的导航任务通常通过光学传感器实现。但是 AGV 需要额外的数据来确定其精确的位置。惯性测量单元F99提供此数据。通过电容式 MEMS 传感器测量科里奥利力,再通过惯性测量单元 F99 高精度地记录任何偏离直线行驶的情况。通过惯性测量单元 IMU F99 输出 AGV 车辆经过转角的转速值,实现动态位置检测和精确导航。
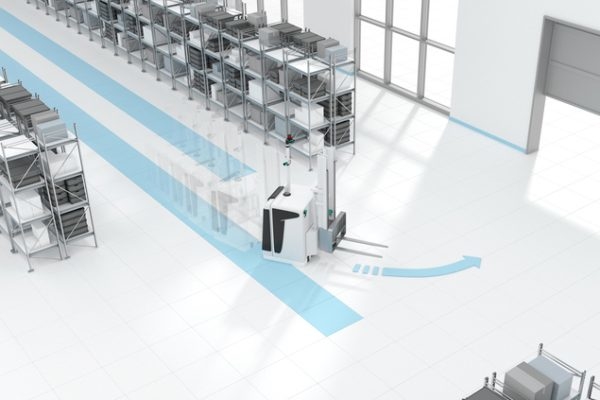
IMU F99 可实现 AGV 的动态位置检测和精确导航,记录与直线运动的任何偏差。


倍加福(北京)过程自动化控制设备有限公司
北京市经济技术开发区
科创十四街99号7号楼3101室
101111 Beijing
中国
pa-info@cn.pepperl-fuchs.com
 +86 10 5901 7000
+86 10 5901 7000
上海倍加福工业自动化贸易有限公司
上海市静安区市北工业园区江场三路
219号4楼
200436 上海
中国
fa-info@cn.pepperl-fuchs.com
+86 21 6630 3939
德国倍加福公司(P+F)是全球自动化行业中久负盛名的专业传感器公司。倍加福作为全球自动化领域的电子传感与零部件的生产主导者,凭借不断的创新,恒久的质量保证,稳健的发展,保证了迄今六十余年的辉煌成就。倍加福在全球范围内拥有6300名员工,位于德国,美国,新加坡,匈牙利,印度尼西亚和越南的生产基地几乎全部通过了ISO9001的质量认证。