

Detection Method and Function

Various sensing principles can be used for different detection tasks. The sensing principle most suitable for the specific application is determined from various considerations: These include the material of the object to be detected, the application environment, and the distance from which the detection is to take place.
If the object to be detected is electrically conductive, e.g., made of metal, and can be detected from close proximity, an inductive sensor is recommended.
Inductive sensors function such that the sensor emits a high-frequency magnetic alternating field. When a metallic switching target approaches this magnetic field, energy is extracted from the alternating field through eddy current loss. In addition, ferromagnetic switching targets cause remagnetization loss. These losses are evaluated and the sensor switches when a defined threshold is reached.
Typical applications include position monitoring of all kinds, the monitoring of valve positions, and the detection of belt travel speeds. The excellent versatility of the physical sensing principle means that many different types of design and sensor versions are available on the market to suit specific operational conditions—such as reduction factor 1 sensors, NAMUR sensors, metal face sensors, and sensors with E1 type approval for use in vehicles.
Depending on the application, the following sensing principles can be used as an alternative:
- Capacitive sensor: for detecting objects made of plastic or paper, and liquids (oily or aqueous), granules, and powders
- Magnetic field sensor: objects that are magnetic or can be equipped with a magnet
Inductive Sensor Design
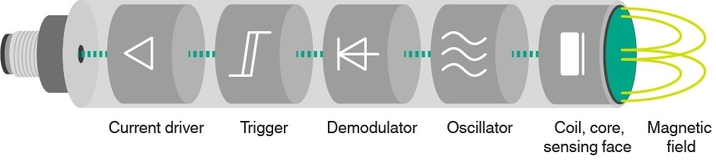
Inductive sensors are noncontact. The sensors detect metal objects located in their measurement field. They use the interaction of the metal object as an electrical conductor with the emitted magnetic alternating field of the sensor to do so. In the electrical conductor, eddy currents are induced, which extract energy from the field and thus affect the level of oscillation amplitude.
The core of the inductive sensor is a coil, usually with a ferrite core, which allows the magnetic field to escape in a specific direction. The oscillator located behind it in the sensor uses an LC resonant circuit to generate a magnetic alternating field, which escapes from the sensing face of the sensor. Eddy currents are induced in the metal object located in the measurement field. These extract energy from the oscillator. The signal level in the oscillator changes. The change in signal level then switches the output stage in binary sensors via a Schmitt trigger. In measuring sensors, this change in signal level affects the analog output signal depending on the object distance.
History of Inductive Proximity Sensors
The first industrial-grade inductive proximity sensor was developed and launched on the market in 1958 by Walter Pepperl and Wilfried Gehl. At the time, the development was driven by neighboring BASF. BASF wanted to replace the mechanical switching contacts used at the time for detecting goods with noncontact switching sensors that did not cause break sparks. The intention was to significantly reduce explosion hazards. Even the first inductive proximity sensor was designed to be intrinsically safe in accordance with NAMUR.
Standardization
All proximity sensors and inductive sensors from Pepperl+Fuchs have been developed, manufactured, and marketed in accordance with the relevant standard IEC/EN 60947 "Low-voltage switching devices—Part 5-2: Control units and switching elements—proximity sensors."
For safety-related sensors from Pepperl+Fuchs, the relevant standard "Low-voltage switching devices—Part 5-3: Control units and switching elements—requirements for proximity devices with defined behavior under fault conditions (PDDB)" also applies.
Additional Information
Inductive sensors have typical key technical data. This must be known to ensure proper use in plants and applications.
The sensor switches at a certain distance from the metallic object. This distance is referred to as the "operating distance." The operating distance is the most important characteristic of an inductive sensor.



Pepperl+Fuchs SE
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
Pepperl+Fuchs is a leading developer and manufacturer of electronic sensors and components for the global automation market. Continuous innovation, enduring quality, and steady growth have been the foundation of our success for more than 70 years. Pepperl+Fuchs employs 6,300 people worldwide and has manufacturing facilities in Germany, USA, Singapore, Hungary, Indonesia and Vietnam, most of them ISO 9001 certified.