

Output Logic of Measuring Sensors

With measuring sensors, the choice of the measuring ranges and the type of measurement results play a key role. Measuring sensors have analog output logic. Depending on the distance of the damping element, the sensor analog output issues a sliding current or voltage value. Typical analog outputs are current outputs with a value range of 4 mA … 20 mA or voltage outputs with a value range of 0 V … 10 V.
Measurement Results
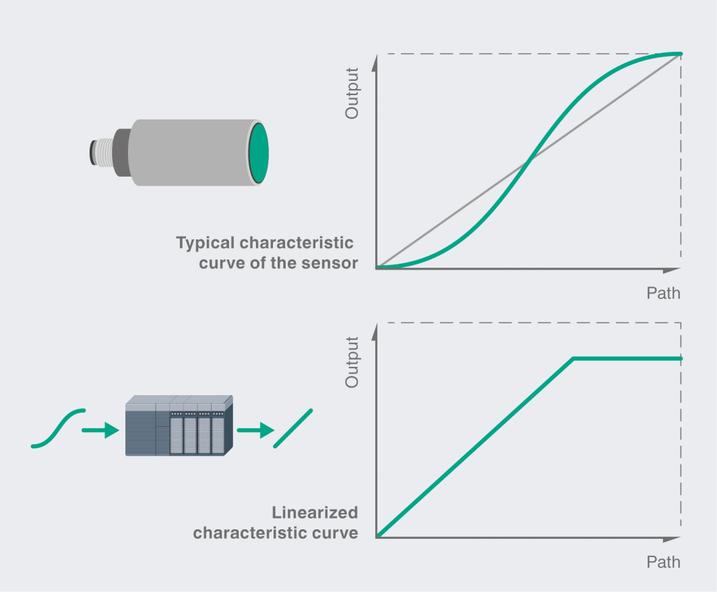
Inductive analog sensors inherently have a nonlinear characteristic curve. A linear output signal is often required for an application. Linearization can be carried out by a programmable logic controller (PLC) using integrated polynomials. Such signal conversion is particularly useful in the following cases:
- Sensors with a linear output characteristic curve are not available for the required measuring range
- Linear signal characteristics are required across the entire measuring range
- Measurement to be carried out quickly
- Signal to be converted simply and cost-effectively
The use of microcontrollers in sensor technology means that sensors are now able to internally perform the linearization of the output characteristic curve.
Framework Conditions for Successful Measurements
Resolution
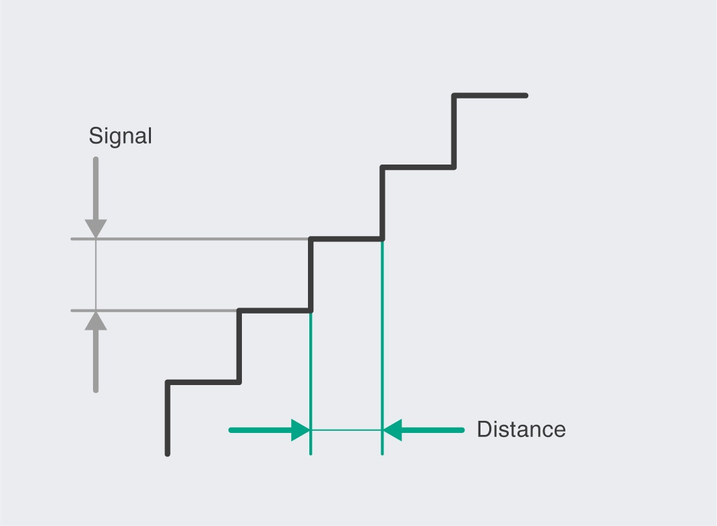
For analog sensors, resolution plays an important role in signal output. This is the smallest change in the distance from sensor to object that can be detected and represented by the sensor into a measurable change in signal. Different types of resolutions are possible.
Dynamic Resolution
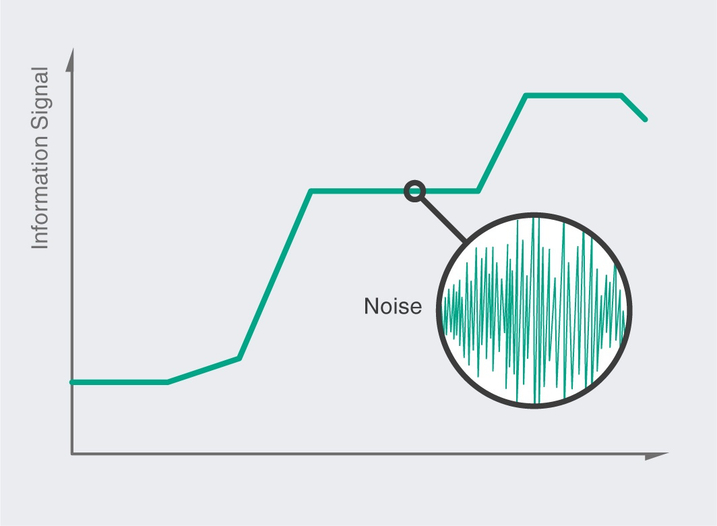
Dynamic resolution is required where fast measurements or high sampling rates are required. This metrology produces high levels of measurement noise, which compromises signal processing. Measurement noise cannot be filtered or can only be filtered to a limited extent without affecting the information signal.
Static Resolution
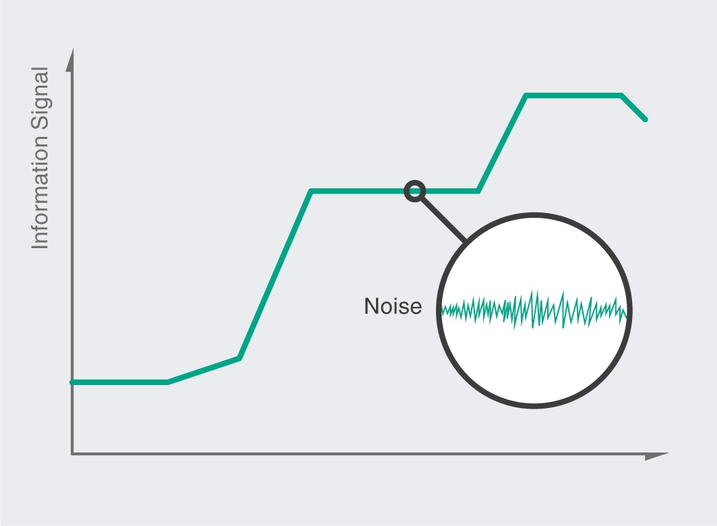
Static resolution can be used for slow object movements or low sampling rates. With this metrology, it is possible to filter high levels of measurement noise. The carrier signal is not affected in the process. This allows the resolution to be significantly increased compared to dynamic measurement.
Repeat Accuracy
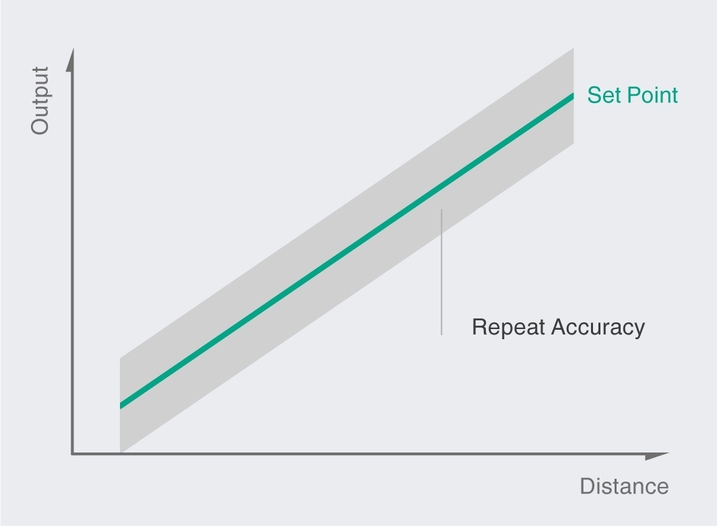
The filter parameters can be changed as required in inductive analog sensors from Pepperl+Fuchs. If users wish to implement a more static application, they can activate a filter with the corresponding parameters for the analog input of their programmable logic controller (PLC). According to EN 60947-5-2, the repeat accuracy is the deviation value of the effective operating distance (sr) under set conditions. The value defines the switch point accuracy of successive measurements over a period of eight hours at an ambient temperature of +23 °C ±5 °C and at a constant operating voltage.
Response Time
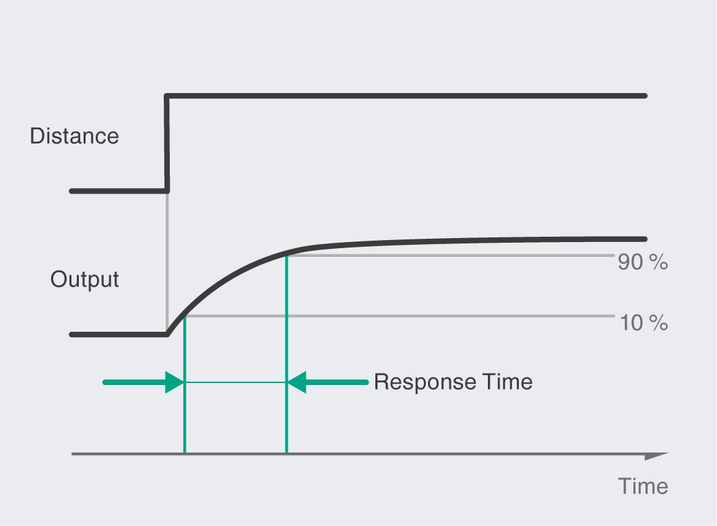
According to EN 60947-5-2, the response time is the time required for the proximity sensor to react after the damping element has entered or leaves the sensing range. Applied to analog sensors, the response time is the time that passes between a sudden change in distance and the representation of the new distance value at the analog output from 10% of the differential value to 90% of the differential value.
Linearity
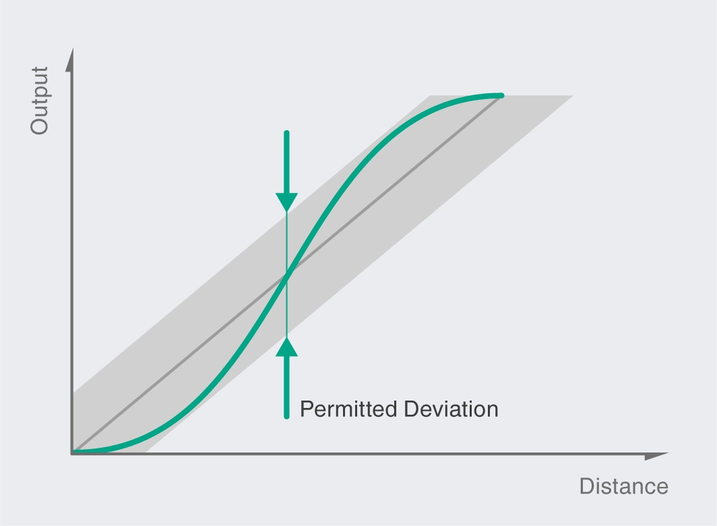
Linearity defines the deviation of the output signal from a straight line. It is expressed as a percentage of the measuring range end ("full scale") value. For applications in which the designated linearity is not sufficient, there is an alternative to use polynomials for the mathematical linearization of the sensor characteristic curve in the programmable logic controller (PLC).



Pepperl+Fuchs SE
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
Pepperl+Fuchs is a leading developer and manufacturer of electronic sensors and components for the global automation market. Continuous innovation, enduring quality, and steady growth have been the foundation of our success for more than 70 years. Pepperl+Fuchs employs 6,300 people worldwide and has manufacturing facilities in Germany, USA, Singapore, Hungary, Indonesia and Vietnam, most of them ISO 9001 certified.