

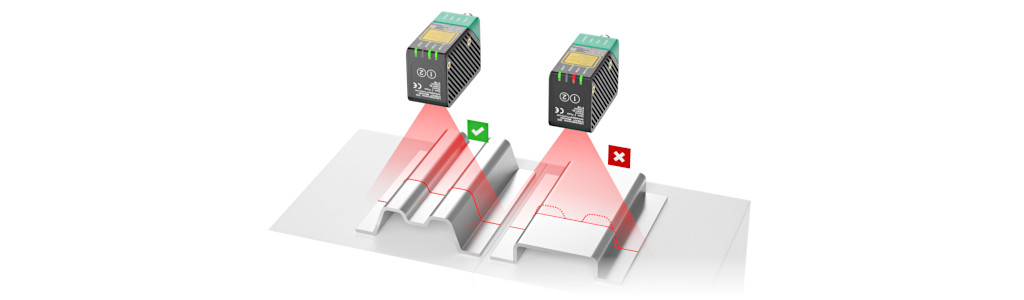
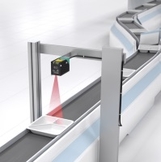
The SmartRunner Matcher uses the laser light section technology to capture height profiles and compares them with a taught reference profile. With up to 32 profiles stored in the sensor, it is perfect for positioning as well as presence and completeness checks of guided components.
The laser profile sensors are based on the unique SmartRunner technology. For the first time, this combines the proven laser light section technology with a 2-D vision sensor including LEDs and offers maximum performance in a compact sensor housing.
SmartRunner Matcher: The Specialist for Profile Matching
The SmartRunner Matcher combines application-specific profile detection with an integrated evaluation in a compact housing. The control unit of the laser profile sensor is optimized to detect deviations from a previously taught-in height profile.
First, a reference profile is taught in via an intuitive operating wizard. In addition, the permitted position and component deviations are defined. Based on this, the sensor verifies the detected profile of the object and its correct position via profile matching. Moreover, variants are available with further functions such as the use and storage of up to 32 profiles on one sensor and the output of the object position deviation. These offer different detection ranges of up to 700 mm distance as well as 300 mm X detection range.
The SmartRunner Matcher can be commissioned easily and intuitively: via the Vision Configurator—the uniform user interface for all vision sensors from Pepperl+Fuchs—via Data Matrix control code or via guided operation and parameterization with the software wizard.
Typical Applications
- Detection of small parts like screws, clamps, and studs
- Completeness check for battery cells, pens, pills, etc.
- Position check and output for boxes, pallets, and other objects
How It Works
This is how the detection of object contour, position and distance works with the Matcher:
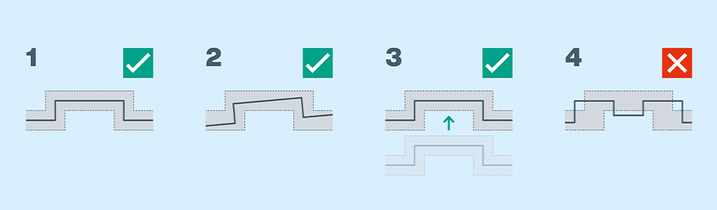
Since not every object is the same, a suitable object tolerance must be defined. This is done by defining an envelope curve around a taught-in profile (1). Depending on this, quality values are automatically determined, from which quality threshold values can then be derived to distinguish between good and bad parts. Users can freely define how high the detection sensitivity of the sensor should be (2). Furthermore, displacement tolerances often result from trigger tolerances. With the Matcher, these can also be set in 0.1 mm steps in the X and Z directions so that they do not influence the measurement result (3). The SmartRunner then reliably detects deviating profiles as “Bad” (4).
Highlights
- Rugged and cost-effective presence, completeness, and position detection of components
- Precise profile matching, even with different surface structures, ambient light, and varying operating distances
- Independently adjustable object and offset tolerances and separate data output
通过以下特定应用示例,了解 SmartRunner Matcher 的更多用途:
在汽车工业中,车身是通过机器人焊接单元焊接的。如果金属板不完整或有缺陷,必须检测出故障并将不正确的金属板从生产线中移除。SmartRunner Matcher 使用线性光列阵测量技术,通过轮廓对比检测物体并确认组件是否完整 …

在车架装配中,零部件使用螺栓、螺丝和夹子等紧固件相互连接。SmartRunner Matcher 会检测这些部件存在有无以及是否在正确的位置,如果缺少紧固件,则会向控制系统发送信号 …

硅酮减振器或“胶粘物”被粘在车架的各个部分,以减少车辆运行时的噪音。为了确保减振器处于正确的位置,将向 SmartRunner Matcher 示教每个“胶粘物”的高度轮廓,并将当前的高度轮廓与参考轮廓进行对比 …

在汽车生产中,车身到不同的工位是通过滑撬输送。滑撬螺栓将车身固定在滑撬上,将滑撬螺栓推入车身锚孔。为了确保此过程的安全性,SmartRunner 事先核实滑撬螺栓的位置。
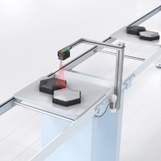
机器人处理系统通常用于将工件或原材料送入生产和加工系统。在机器人系统进行物料抓取之前,有必要检查物料是否存在(有无检查)以及物料是否处于正确位置(位置控制)。SmartRunner Matcher 可以在一个步骤中完成两个检测任务。
在食品行业中,生产即食食品时, 经常会把一个塑料托盘分成几个小仓格。为确保将配料填充到正确的仓格中,必须事先检查白色托盘是否正确放置。即使在这些困难的环境条件下,SmartRunner Matcher 仍可提供清晰的检测结果。



台灣倍加福有限公司
信義路5段150巷2號21樓之4
信義區
11059 台北市 臺灣
臺灣
fa-info@tw.pepperl-fuchs.com
 +886 2 27227708
+886 2 27227708
Pepperl+Fuchs 倍加福是領先全球的電子感測器 和 零組件的開發與製造商. 超過七十年的不斷創新、穩定的品質與持續的業績增長,成就了今日的我們, Pepperl+Fuchs 倍加福在全球擁有 6,300 名員工,並在德國、美國、新加坡、匈牙利、印尼和越南都設有製造工廠,其中多數工廠已通過 ISO 9001 認證