




Nieuwe, Veelzijdige Toepassingen
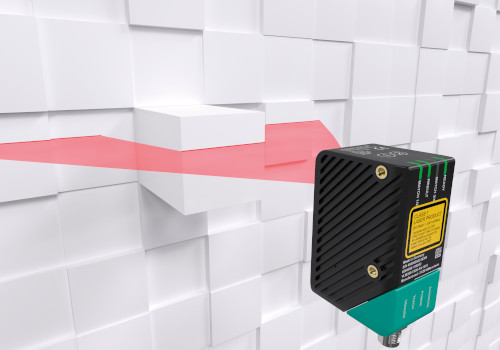
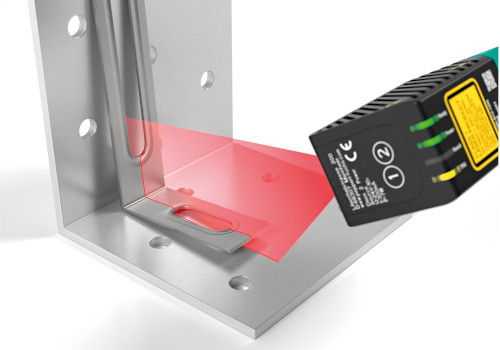
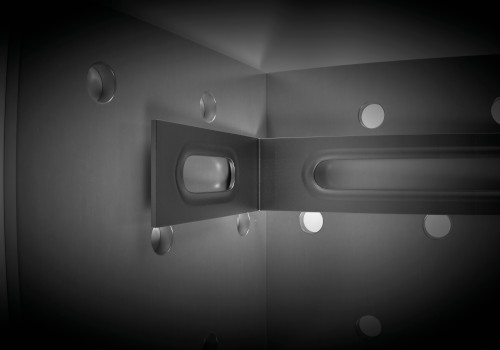
SmartRunner-technologie is een unieke combinatie van lichtsectietechnologie en een 2D-vision sensor met ingebouwde LED’s. Deze innovatieve combinatie opent de deur voor volledig nieuwe applicatieoplossingen voor industriële detectietaken en stelt u in staat efficiënte, toekomstbestendige processen te ontwerpen.




 Meer Informatie
Meer Informatie

 +31 73 75 07 107
+31 73 75 07 107