

Types de détecteurs radars
Le terme radar ou RADAR (acronyme de « radio detection and ranging » ou détection et télémétrie radio en français) fait référence aux méthodes de localisation et de détermination de l'état de mouvement d'une grande variété d'objets. Les méthodes radars sont utilisées dans un large éventail d'applications. Par conséquent, il existe diverses fonctions radars qui utilisent les propriétés des ondes électromagnétiques de différentes manières.
1. Radar à impulsions
Le radar à impulsions émet des impulsions courtes et détermine la distance de l'objet via le délai de propagation du signal. Comme pour un radar Doppler, la vitesse peut également être déterminée en mesurant la différence de fréquence. Les radars à impulsions sont adaptés aux mesures sur de longues distances en raison de la puissance rayonnée élevée de leur émetteur, mais ils ne sont pas adaptés aux mesures de courte distance avec une résolution accrue. En raison de cette limitation considérable des radars à impulsions pour les tâches d'automatisation, les explications détaillées sur ce site Web se concentrent exclusivement sur les radars à onde continue et à onde continue modulée en fréquence.
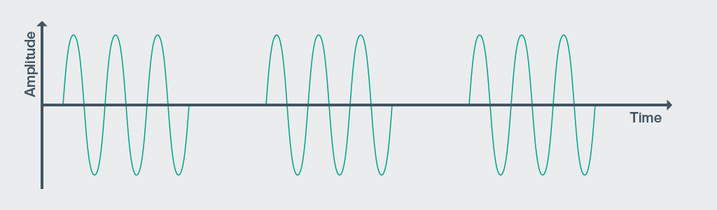
2. Radar à onde continue (radar CW)
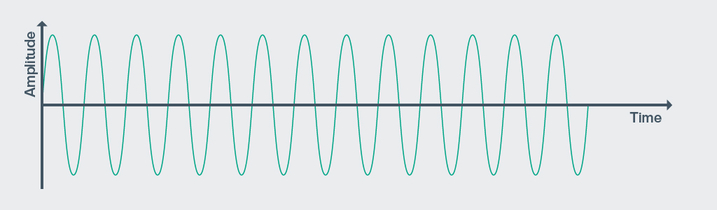
Un radar à onde continue non modulée (également appelé radar CW ou Doppler) émet en continu une fréquence fixe. L'observation de la fréquence Doppler permet de détecter des objets en mouvement dans la plage de détection du détecteur et de déterminer leur vitesse orthogonale. Cependant, il n'est pas possible, ou seulement possible avec un plus grand effort et d'importantes imprécisions, de calculer la distance ou la position de l'objet en mouvement.
3. Radar à onde continue modulée en fréquence (radar FMCW)
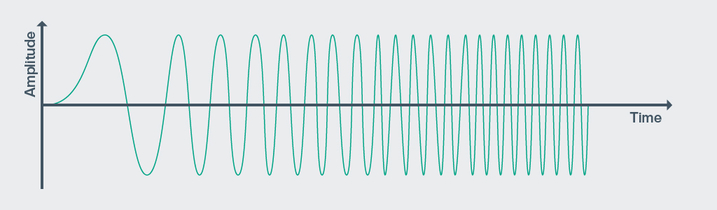
Le terme radar à onde continue modulée en fréquence (ou FMCW) fait référence à un radar qui (contrairement à un radar CW) module continuellement en fréquence son signal pendant l'émission. Cette modulation de la fréquence émise crée un point de référence temporel, qui permet sur le plan technique de mesurer le temps de vol. De plus, cette constante de temps permet de détecter non seulement des objets mobiles, mais aussi des objets statiques.
Plongée en profondeur : radar à onde continue (CW)
Les ondes électromagnétiques générées et émises par un radar à onde continue ou leurs fronts d'ondes frappent un objet en mouvement. Il en résulte un décalage de fréquence qui comprime ou étend le signal réfléchi, en fonction de la direction du mouvement de l'objet détecté. Ce signal de réflexion décalé en fréquence est mélangé au signal émis à l'origine dans le détecteur et évalué. Cette différence de fréquence dans le signal peut être utilisée pour déterminer le mouvement et la vitesse. Que le détecteur se déplace par rapport à l'objet ou que l'objet se déplace par rapport au détecteur n'a pas d'importance, même si l'angle du mouvement doit être pris en compte pour détecter la vitesse absolue de l'objet.
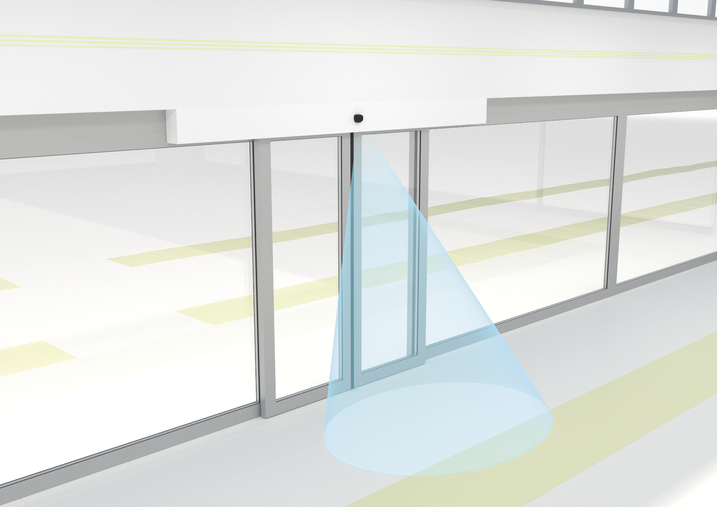
Usage prévu
Ce principe est la solution la plus efficace pour détecter des objets en mouvement. Les détecteurs de mouvement pour le contrôle de zone devant les portes et les portails sont un domaine d'application classique. Sensotek GmbH, filiale de Pepperl+Fuchs, est un partenaire qualifié offrant un portefeuille hautement spécialisé dans le domaine de l'« automatisation des entrées ».
Plongée en profondeur : radar à onde continue modulée en fréquence (FMCW)
Un radar à onde continue modulée en fréquence fonctionne selon le même principe de base. Le détecteur émet un signal via une antenne émettrice. Une petite partie de ce signal est réfléchie par l'objet et est renvoyée vers le détecteur, où elle est captée par une antenne réceptrice. Cependant, contrairement au radar à onde continue non modulée, le radar à onde continue modulée en fréquence émet un signal modulé en fréquence. Les types de modulations typiques suivants sont souvent utilisés ici :

1. Modulation en dents de scie
Forme de modulation simple, mais ne peut pas distinguer la fréquence Doppler de la différence de fréquence en raison du retard de propagation.

2. Modulation en ondes carrées
Très haute résolution de distance en calculant la différence de phase, mais ne peut pas distinguer les différents objets.

3. Modulation triangulaire
La rampe descendante supplémentaire permet de distinguer le décalage Doppler du décalage de fréquence.
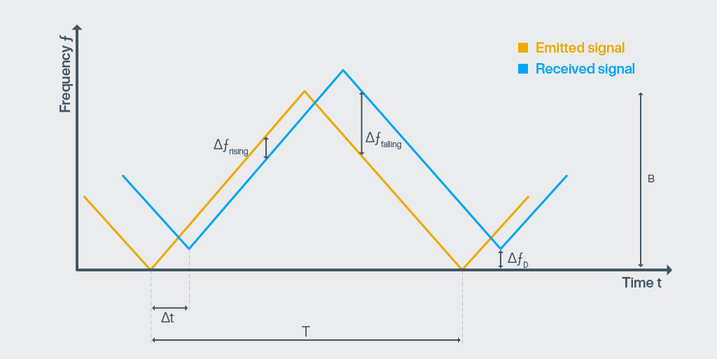
Pepperl+Fuchs utilise la modulation triangulaire pour ses détecteurs radars industriels pour la mesure de distance et de vitesse. Le signal émis augmente linéairement dans la plage de fréquences autorisée de la fréquence minimale à la fréquence maximale (rampe ascendante) et rechute linéairement après avoir atteint la fréquence maximale (rampe descendante). Cette plage, à l'intérieur de laquelle le signal émis « erre » en continu entre la fréquence minimale et la fréquence maximale, est appelée largeur de bande de fréquences (B). Dans le cas des détecteurs radars de Pepperl+Fuchs, cette largeur de bande effective correspond à 1 GHz, c'est-à-dire la plage de 122 à 123 GHz dans la bande ISM.
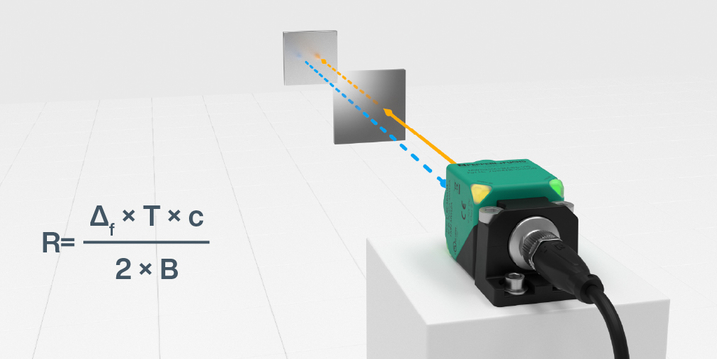
Si les ondes radars émises par le détecteur radars frappent maintenant un objet, elles sont complètement ou partiellement réfléchies. Le signal reçu présente une fréquence différente, la distance exacte par rapport à l'objet peut ainsi être déterminée à partir du décalage de fréquence des deux signaux au cours d'un processus de mélange multiplicatif dans le détecteur. La distance (R) par rapport à l'objet cible peut être calculée à partir du décalage de fréquence déterminé dans une rampe montante ou descendante (Δf), de la durée de la rampe (T), de la largeur de bande de fréquences utilisée (B), et la vitesse de la lumière (c) à laquelle l'onde radar se propage dans l'espace.
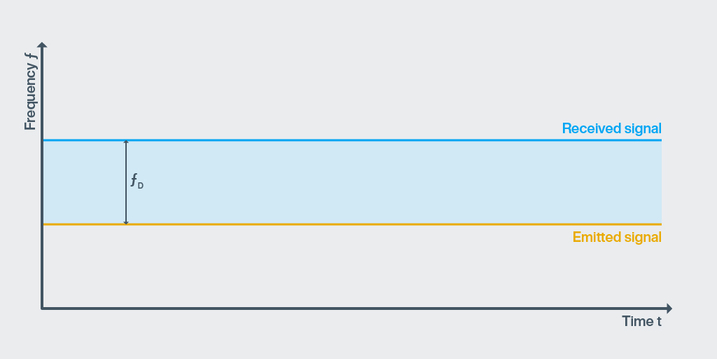
L'effet Doppler provoqué par la vitesse de l'objet décale également la fréquence reçue (fD) parallèlement à l'axe y, comme illustré sur le graphique du radar CW ci-dessus. Contrairement aux méthodes de modulation en dents de scie et en ondes carrées, cela peut également être utilisé pour mesurer la vitesse.
Usage prévu
Le détecteur radar FMCW MWC25M-L2M* mis au point par Pepperl+Fuchs est optimisé pour les mesures de distance et de vitesse à des plages de détection allant jusqu'à 25 mètres et plus dans les sections industrielles. En raison de sa large gamme de fonctions et de sa robustesse de conception, le détecteur peut être utilisé pour une gamme d'applications diverses, telles que l'automatisation, la surveillance de l'environnement et la prévention des collisions pour les véhicules à guidage automatique, les chariots élévateurs, les grues mobiles, la construction de routes ou les machines agricoles. Cependant, il constitue également une solution idéale pour la détection de niveau sans contact des liquides et des marchandises en vrac dans les réservoirs et les silos.

En savoir plus sur la technologie radar

Les détecteurs radar industriels Pepperl+Fuchs vous permettent de mesurer la distance et la vitesse sans interférence, même en cas de pluie, de brouillard, de vent ou de poussière. Découvrez ce principe de fonctionnement de détection unique et tous les avantages qu'il peut vous offrir.


Pepperl+Fuchs Eurl
12 Avenue des Tropiques
91955 Courtaboeuf Cedex
France
info@fr.pepperl-fuchs.com
 +33 1 60921300
+33 1 60921300
Pepperl+Fuchs est leader comme concepteur et fabricant de capteurs et composants électroniques pour le marché mondial de l'automatisation. L'innovation constante, la qualité incontestable et la croissance soutenue, garantissent notre succès, depuis plus de 70 ans. Pepperl+Fuchs emploie 6300 personnes dans le monde et compte des usines en Allemagne, aux USA, à Singapour, en Hongrie, en Indonésie et au Vietnam ; la plupart d'entre elles sont certifiées ISO 9001.