

生産工場での途切れない給送
光切断法センサは有無と位置をチェックします。
アプリケーション
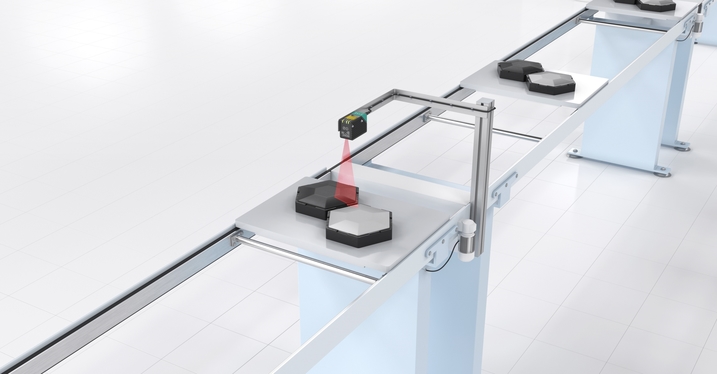
ロボット・ハンドル・システムは、加工品や材料を生産ラインや処理システムに投入するために使われます。キャリヤは、材料をプラントに輸送するのに使用されます。そして、材料はそこで自動的に取り出されます。従来のソリューションでは、標準のビジョンセンサは、送られてきた材料の位置を制御するために使用されます。このプロセスは、高価で複雑です。コントラストが低いターゲットが通過するとき、検出性能の限界に達します。これに対処するためには、標準のビジョンセンサは外部照明設置と複雑な構成が必要となってきます。
ゴール
生産工場で費用対効果に優れた稼働を維持するためには、途切れない材料の供給が重要です。色がさまざまである材料はキャリヤを用いてマシンに輸送されます。材料がロボットにつかまれる前に、材料が存在しているかどうかと(存在チェック)、材料が正しい位置にあるか(ポジション・コントロール)をチェックすることが必要です。休止のない稼働や無駄のない生産は、効率的な運用で最も重要なとこです。
ソリューション
Pepperl+Fuchsの光切断法センサSmartRunner Matcherを用いて、両方の検出タスクをシングルステップで実行できます。センサは、コンベヤ・システムの上部に取り付けられ、表面形状プロファイルの検出で、同時に2つの項目をチェックします。検出した表面形状プロファイルがセンサの参照プロファイルに一致していると、判別出力は「good」信号を送ります。表面形状プロファイルが異なる場合は、材料が無い、または正しく配置されていないことを示します。そして、センサは「Bad」信号を送ります。その結果、SmartRunner Matcherは無駄な廃棄物と休止時間を抑え、より効率的な生産を可能にします。
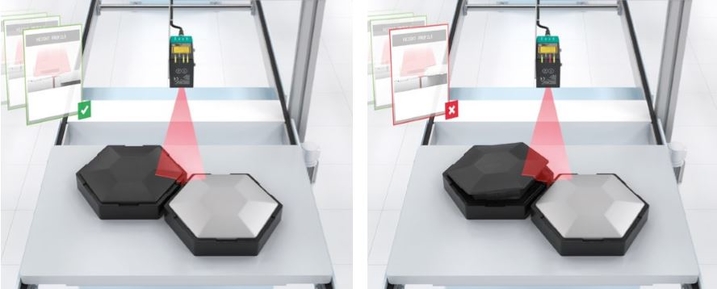
検出されたプロファイルが記憶された参照プロファイルに一致しているかどうかによって、SmartRunner Matcherの判別出力は「Good」、「bad」信号を送ります。
ベネフィット
SmartRunner Matchersは、工場の現場で表面形状プロファイルを記憶、検出し比較を行います。専門的な技術を必要とせず、直接アプリケーションに取り入れることができます。構成がしやすく、生データを評価する必要はありません。そして、どんなコントローラにも対応できる判別信号として検出結果を送ります。光切断法は非常に正確で、確実な結果を送ります。ターゲット表面の材質、コントラスト、色に影響を受けません。従来のビジョンベースのソリューションと異なり、高価で設置が難しい外部照明は必要ではありません。検出距離160mmのモデルは、複数ターゲットを検出、比較します。また、SmartRunner Matcherのエクステンデッドバージョンは、表面形状プロファイルを最大32個保存できます。プラントの段取り変えの際、迅速な再パラメータ設定が可能です。


株式会社 ピーアンドエフ
〒220-0022
神奈川県横浜市西区花咲町6-145
横浜花咲ビル5F 日本
日本
sales@jp.pepperl-fuchs.com
 +81 45 6249077
+81 45 6249077
株式会社ピーアンドエフ
大阪府豊中市新千里東町1-5-3
千里朝日阪急ビル15階
〒560-0082 大阪
日本
sales@jp.pepperl-fuchs.com
+81 6 6836-5620
Pepperl+Fuchsはグローバルオートメーション市場向けにセンサや部品の開発を行っており、革新的かつ高品質な技術躍進のために日々努力を続けています。ドイツ・アメリカ・シンガポール・ハンガリー・インドネシア・ベトナムに生産拠点があり、すべての工場でISO9001認証を取得しています。