

Tipos de sensores de radar
El término radar o RADAR (del inglés Radio Detection And Ranging, detección y medición de distancias por radio) se refiere a los métodos para localizar y determinar el estado de movimiento de una amplia variedad de objetos. Los métodos de radar se utilizan en una gran variedad de aplicaciones. En consecuencia, existen varias funciones de radar que utilizan las propiedades de las ondas electromagnéticas de diferentes maneras.
1. Radar de impulsos
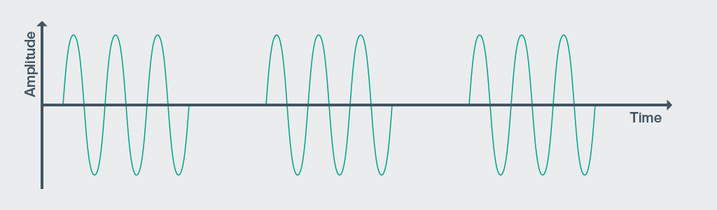
El radar de impulsos emite impulsos cortos y determina la distancia del objeto a través del retardo de propagación de la señal. Al igual que un radar Doppler, la velocidad también se puede determinar midiendo la diferencia de frecuencia. Los dispositivos de radar de impulsos son adecuados para mediciones en distancias largas debido a su alta potencia radiada del transmisor, pero no son adecuados para mediciones de corta distancia con mayor resolución. Debido a esta limitación considerable de los radares de impulsos para tareas de automatización, las explicaciones en profundidad en este sitio web se centran exclusivamente en radares de onda continua y de onda continua modulada por frecuencia.
2. Radar de onda continua (radar CW)
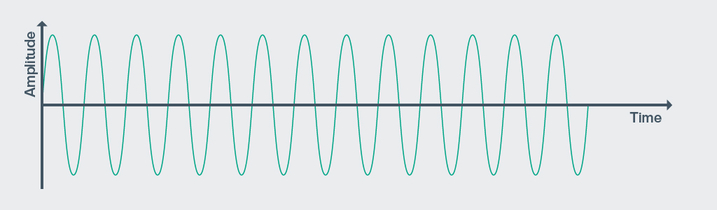
Un radar de onda continua sin modular (también conocido como radar CW [del inglés Continuous Wave, onda continua] o Doppler) emite continuamente una frecuencia fija. Mediante la observación de la frecuencia Doppler, se detectan objetos en movimiento en el rango de detección del sensor y se determina su velocidad ortogonal. Sin embargo, no es posible calcular la distancia o la posición del objeto en movimiento, o bien solo es posible con un mayor esfuerzo e imprecisiones.
3. Radar de onda continua modulada por frecuencia (radar FMCW)
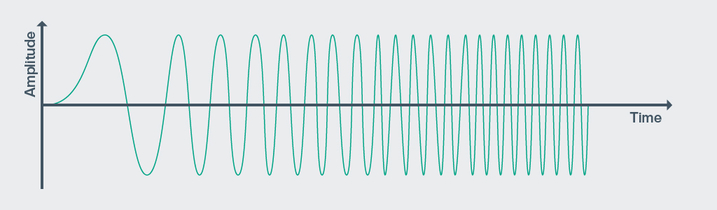
El término radar de onda continua modulada por frecuencia (o FMCW, del inglés Frequency-Modulated Continuous Wave) se refiere a un radar que, al contrario de un radar CW, modula continuamente la frecuencia de su señal durante la emisión. Esta modulación de la frecuencia emitida crea un punto de referencia temporal, que hace que sea técnicamente posible medir el tiempo de vuelo. Además, esta constante de tiempo no solo permite mover, sino también detectar objetos estáticos.
Radar de onda continua (CW) de inmersión profunda
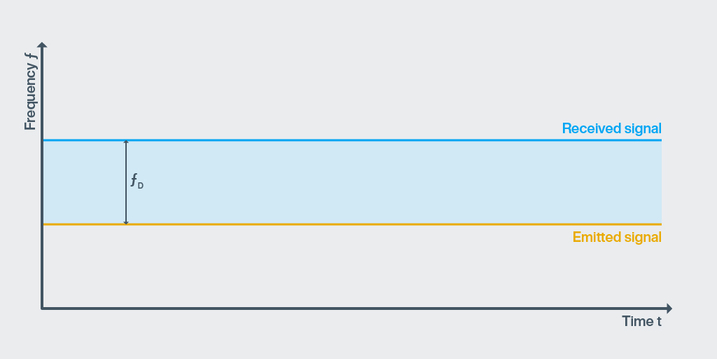
Las ondas electromagnéticas generadas y emitidas por un radar de onda continua o sus frentes de onda golpean un objeto en movimiento. Esto da como resultado un cambio de frecuencia, que comprime o expande la señal reflejada, dependiendo de la dirección del movimiento del objeto detectado. Esta señal de reflexión desplazada por la frecuencia se mezcla con la señal emitida originalmente dentro del sensor y se evalúa. Esta diferencia de frecuencia en la señal se puede utilizar para determinar el movimiento y la velocidad. No es importante si el sensor se mueve o no en relación con el objeto, ni si el objeto se mueve en relación con el sensor, aunque se debe tener en cuenta el ángulo del movimiento para detectar la velocidad absoluta del objeto.
Propósito previsto
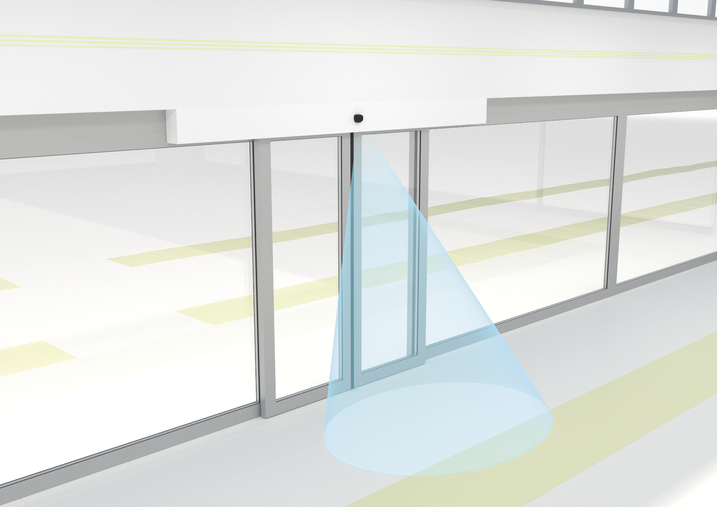
Este principio es la solución más eficaz para detectar objetos en movimiento. Los detectores de movimiento para el monitoreo de área enfrente de puertas y compuertas son un área clásica de aplicación. La subsidiaria Sensotek GmbH de Pepperl+Fuchs es un socio competente, que ofrece una cartera altamente especializada en el campo de "automatización de entradas".
Radar de onda continua modulada por frecuencia (FMCW) de inmersión profunda
Un radar de onda continua modulada por frecuencia funciona de acuerdo con el mismo principio básico. El sensor emite una señal a través de una antena transmisora. Una pequeña parte de esta señal se refleja en el objeto y se irradia de vuelta al sensor, donde es captada por una antena receptora. Sin embargo, a diferencia del radar CW sin modular, el radar de onda continua modulada por frecuencia emite una señal modulada por frecuencia. Los siguientes tipos de modulación típicos se utilizan a menudo aquí:

1. Modulación de diente de sierra
Patrón de modulación simple, pero no puede distinguir entre la frecuencia Doppler y la diferencia de frecuencia debido a la demora de propagación.

2. Modulación de ondas cuadradas
Resolución de distancia muy alta mediante el cálculo de la diferencia de fase, pero no puede distinguir entre diferentes objetos.

3. Modulación triangular
La rampa de caída adicional hace posible distinguir entre el cambio de Doppler y el cambio de frecuencia.
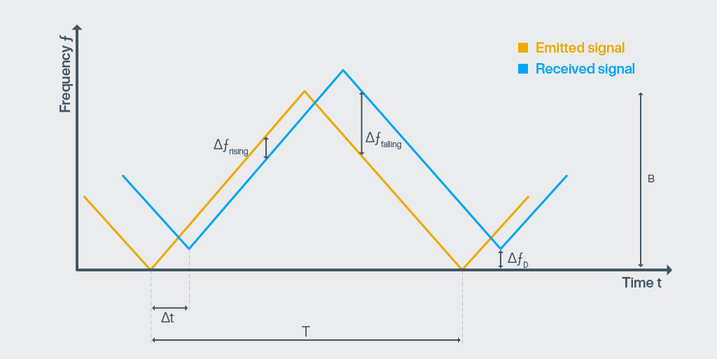
Pepperl+Fuchs utiliza modulación triangular para sus sensores de radar industriales para medir la distancia y la velocidad. La señal emitida aumenta linealmente en el rango de frecuencia permitido desde la frecuencia mínima hasta la máxima (rampa ascendente) y disminuye linealmente nuevamente después de alcanzar la frecuencia máxima (rampa descendente). Este rango, dentro del cual la señal emitida continuamente "vaga" entre la frecuencia mínima y máxima, se denomina ancho de banda de frecuencia (B). En el caso de los sensores de radar de Pepperl+Fuchs, este ancho de banda efectivo corresponde a 1 GHz, a saber, el rango de 122 a 123 GHz en la banda ISM.
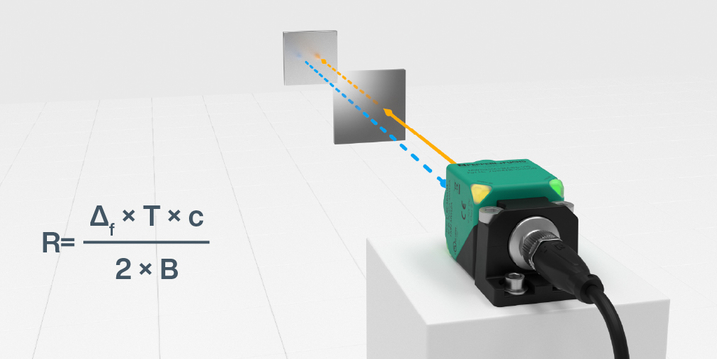
Si las ondas de radar emitidas por el sensor de radar ahora golpean un objeto, se reflejan completa o parcialmente. La señal recibida tiene una frecuencia diferente, por lo que la distancia exacta al objeto se puede determinar a partir del cambio de frecuencia de ambas señales en el transcurso de un proceso de mezcla multiplicativo en el sensor. La distancia (R) al objeto objetivo se puede calcular a partir del cambio de frecuencia determinado en una rampa ascendente o descendente (Δf), la duración de la rampa (T), el ancho de banda de frecuencia utilizado (B) y la velocidad de la luz (c) a la que la onda de radar se desplaza a través del espacio.
El efecto Doppler causado por la velocidad del objeto también cambia la frecuencia recibida (fD) en paralelo al eje y, como se muestra en el gráfico del radar CW anterior. A diferencia de los métodos de modulación de diente de sierra y de onda cuadrada, esto también se puede utilizar para medir la velocidad.
Propósito previsto
El sensor de radar FMCW MWC25M-L2M* desarrollado por Pepperl+Fuchs está optimizado para mediciones de distancia y velocidad en rangos de detección de hasta 25 metros y más en secciones industriales. Debido a su amplia gama de funciones y a la solidez de su diseño, el sensor se puede utilizar para una gama de aplicaciones correspondientemente diversa, como automatización, monitoreo ambiental y prevención de colisiones para AGV, montacargas, grúas móviles, construcción de carreteras o maquinaria agrícola. Sin embargo, también ofrece una solución ideal para la detección de nivel sin contacto de líquidos y productos a granel en depósitos y silos.

Conozca en más detalle la tecnología de radar

Los sensores de radar industriales de Pepperl+Fuchs ofrecen medición de distancia y velocidad sin interferencias, incluso con lluvia, niebla, viento o polvo. Obtenga más información sobre este principio de funcionamiento sensorial único y todas las ventajas que le ofrece.


Pepperl+Fuchs SE
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
Pepperl + Fuchs es líder en el desarrollo y la fabricación de sensores electrónicos y componentes para el mercado de la automatización global. Su incesante innovación, calidad duradera y crecimiento constante garantizan el éxito continuado, desde hace más de 70 años. Pepperl + Fuchs emplea a 6.300 personas en todo el mundo y cuenta con fábricas en Alemania, EE.UU., Singapur, Hungría, Indonesia y Vietnam, la mayoría de ellas con certificado ISO 9001.