

Types of Radar Sensors
The term radar or RADAR (acronym for radio detection and ranging) refers to methods for locating and determining the state of movement of a wide variety of objects. Radar methods are used in a large array of applications. Accordingly, there are various radar functions that use the properties of electromagnetic waves in different ways.
1. Pulse Radar
The pulse radar emits short pulses and determines the distance of the object via the signal propagation delay. Similar to a Doppler radar, the velocity can also be determined by measuring the difference in frequency. Pulse radar devices are suitable for measurements over long distances due to their high transmitter radiated power, but are not suitable for short distance measurements with increased resolution. Due to this considerable limitation of pulse radars for automation tasks, the in-depth explanations on this website focus exclusively on continuous wave and frequency-modulated continuous wave radars.
2. Continuous Wave Radar (CW Radar)
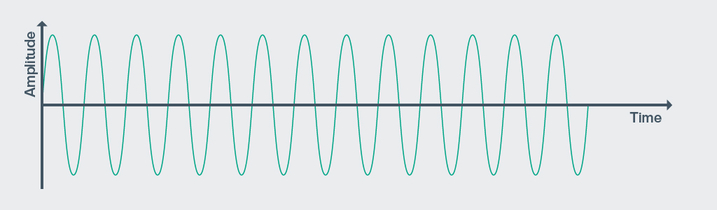
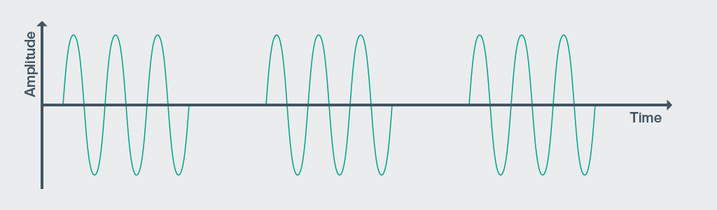
An unmodulated continuous wave radar (also known as CW or Doppler radar) continuously emits a fixed frequency. By observing the Doppler frequency, moving objects in the detection range of the sensor are detected and their orthogonal velocity is determined. However, it is not possible, or only possible with increased effort and great inaccuracies, to calculate the distance or position of the moving object.
3. Frequency-Modulated Continuous Wave Radar (FMCW Radar)
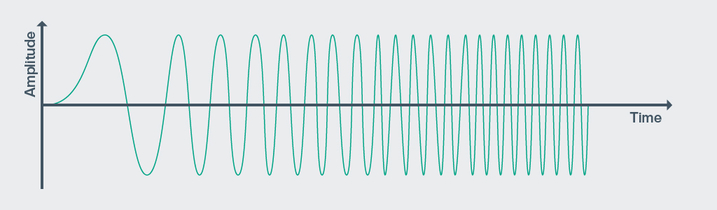
The term frequency-modulated continuous wave radar (or FMCW) refers to a radar that (contrary to a CW radar) continuously frequency-modulates its signal during emission. This modulation of the emitted frequency creates a temporal reference point, which makes it technically possible to measure the time of flight. In addition, this time constant allows not only moving but also static objects to be detected.
Deep Dive Continuous Wave Radar (CW)
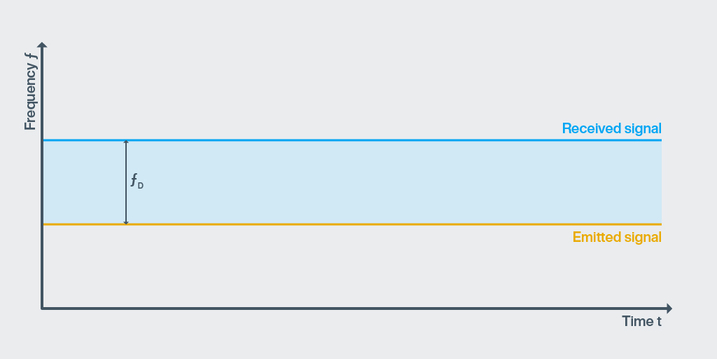
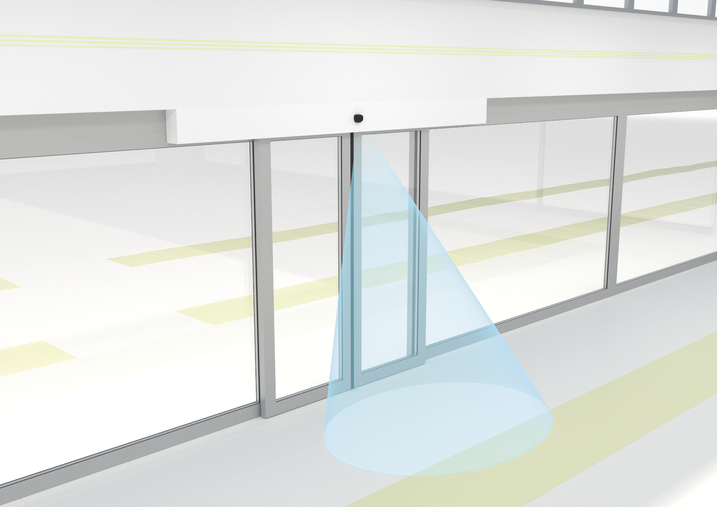
The electromagnetic waves generated and emitted by a continuous wave radar or their wavefronts hit an object in motion. This results in a frequency shift that either compresses or expands the reflected signal—depending on the direction of movement of the detected object. This frequency-shifted reflection signal is mixed with the originally emitted signal within the sensor and evaluated. This frequency difference in the signal can be used to determine movement and velocity. Whether the sensor moves relative to the object or the object moves relative to the sensor is not relevant, although the angle of the movement must be taken into account in order to detect the absolute velocity of the object.
Intended Purpose
This principle is the most effective solution for detecting moving objects. Motion detectors for area monitoring in front of doors and gates are a classic area of application. Pepperl+Fuchs subsidiary Sensotek GmbH is a competent partner offering a highly specialized portfolio in the field of "Entrance Automation".
Deep Dive Frequency-Modulated Continuous Wave Radar (FMCW)
A frequency-modulated continuous wave radar works according to the same basic principle. The sensor emits a signal via a sending antenna. A small part of this signal is reflected by the object and radiates back to the sensor, where it is picked up by a receiver antenna. In contrast to unmodulated CW radar, however, frequency-modulated continuous-wave radar emits a frequency-modulated signal. The following typical modulation types are often used here:

1. Sawtooth Modulation
Simple modulation pattern, but cannot distinguish between Doppler frequency and frequency difference due to propagation delay.

2. Square-Wave Modulation
Very high distance resolution by calculating the phase difference, but cannot distinguish between different objects.

3. Triangular Modulation
The additional falling ramp makes it possible to distinguish between Doppler shift and frequency shift.
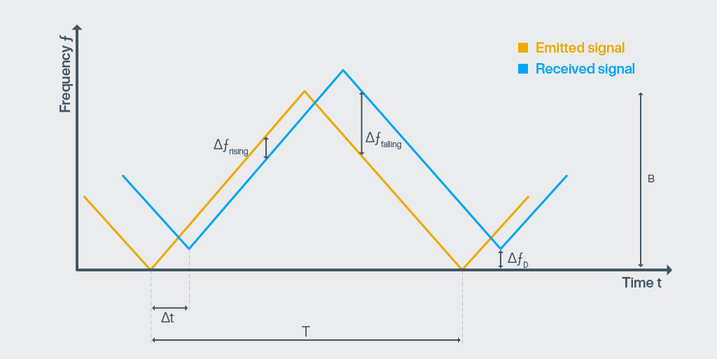
Pepperl+Fuchs uses triangular modulation for its industrial radar sensors for distance and velocity measurement. The emitted signal increases linearly in the permitted frequency range from the minimum to the maximum frequency (up ramp) and drops linearly again after reaching the maximum frequency (down ramp). This range, within which the emitted signal continuously "wanders" between the minimum and maximum frequency, is referred to as the frequency bandwidth (B). In the case of radar sensors from Pepperl+Fuchs, this effective bandwidth corresponds to 1 GHz, namely the range from 122 to 123 GHz in the ISM band.
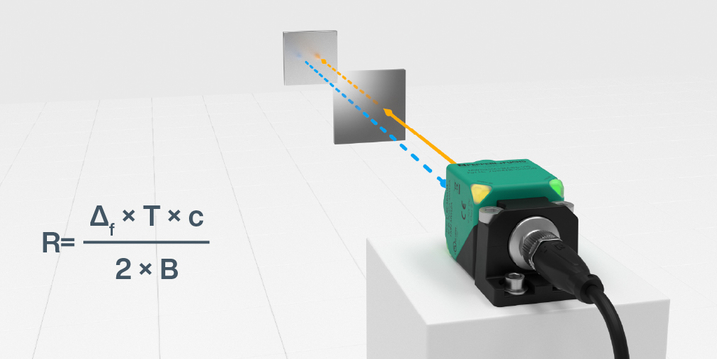
If the radar waves emitted by the radar sensor now hit an object, they are completely or partially reflected. The received signal has a different frequency, whereby the exact distance to the object can be determined from the frequency shift of both signals in the course of a multiplicative mixing process in the sensor. The distance (R) to the target object can be calculated from the determined frequency shift in an rising or falling ramp (Δf), the ramp duration (T), the frequency bandwidth used (B), and the speed of light (c) at which the radar wave travels through space.
The Doppler effect caused by the speed of the object also shifts the received frequency (fD) parallel to the y-axis, as shown in the CW radar graphic above. In contrast to the sawtooth and square-wave modulation methods, this can also be used to measure the speed.
Intended Purpose
The FMCW radar sensor MWC25M-L2M* developed by Pepperl+Fuchs is optimized for distance and velocity measurements at detection ranges of up to 25 meters and more in industrial sections. Due to the wide range of functions and robustness of the sensor design, it can be used for a correspondingly diverse range of applications, such as automation, environment monitoring, and collision avoidance for AGVs, forklifts, mobile cranes, road construction, or agricultural machinery. However, they also offer an ideal solution for noncontact level detection of liquids and bulk goods in tanks and silos.

Learn More about Radar Technology

Pepperl+Fuchs industrial radar sensors offer you interference-free distance and velocity measurement—even in rain, fog, wind, or dust. Learn more about this unique sensory operating principle and all the advantages it opens up for you.


株式会社 ピーアンドエフ
〒220-0022
神奈川県横浜市西区花咲町6-145
横浜花咲ビル5F 日本
日本
sales@jp.pepperl-fuchs.com
 +81 45 6249077
+81 45 6249077
株式会社ピーアンドエフ
大阪府豊中市新千里東町1-5-3
千里朝日阪急ビル15階
〒560-0082 大阪
日本
sales@jp.pepperl-fuchs.com
+81 6 6836-5620
Pepperl+Fuchsはグローバルオートメーション市場向けにセンサや部品の開発を行っており、革新的かつ高品質な技術躍進のために日々努力を続けています。ドイツ・アメリカ・シンガポール・ハンガリー・インドネシア・ベトナムに生産拠点があり、すべての工場でISO9001認証を取得しています。