

Operating Distance as Central Characteristic
Czujnik pojemnościowy przełącza się na określoną odległość od wykrywanego materiału. Odległość ta jest określana jako „odległość robocza”. Odległość robocza jest najważniejszą cechą czujnika pojemnościowego. Odległość robocza zależy od średnicy elektrody czujnika. Wymiary i skład materiału elementu tłumiącego oraz temperatura otoczenia są dodatkowymi czynnikami wpływającymi na pracę.
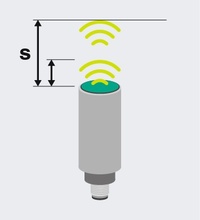
Definicja odległości roboczej (s)
Norma EN 60947-5-2 określa odległość roboczą (s) dla wszystkich typów czujników innych niż czujniki szczelinowe i czujniki w kształcie pierścienia. „Odległość robocza” w treści normy oznacza „odległość, w której zmiana sygnału na wyjściu jest spowodowana podejściem ‘standardowego celu’ do powierzchni wykrywania wzdłuż osi odniesienia”.
Są dwa sposoby wzbudzania czujnika:
- Przy użyciu podejścia osiowego,
- Przy użyciu podejścia promieniowego.
Odległość robocza czujnika pojemnościowego s bazuje na uziemionym metalowym obiekcie o określonej wielkości. Dla porównania, zmiana pojemności jest mniejsza w przypadku materiałów nieprzewodzących lub materiałów przewodzących bez uziemienia. Dlatego obiekt musi znajdować się bliżej elektrody czujnika do działania przełącznika. Rzeczywista odległość robocza zależy od następujących czynników:
- Powierzchnia wykrywania elektrody czujnika
- Rozmiar i stan uziemienia wykrywanego obiektu
- Materiał (przenikalność elektryczna) wykrywanego obiektu
- Warunki montażu czujnika
Im niższa jest wartość przenikalności elektrycznej danego materiału w inaczej porównywalnych warunkach montażu geometrycznego, tym mniejsza jest osiągalna odległość robocza s. W przypadku większości czujników pojemnościowych czułość można ustawić w dostępnych granicach, korzystając z potencjometru na czujniku. W ten sposób można dostosować ustawioną fabrycznie domyślną odległość roboczą do materiału obiektu i warunków montażu czujnika.
Wyznaczanie odległości roboczych za pomocą standardowego celu z uziemieniem
Standardowy cel jest zdefiniowany jako „optymalny element wykonawczy” (~element tłumiący) do pracy. Zmniejszenie wymiarów lub zmiana składu materiału powoduje zmniejszenie odległości roboczej.
Standardowy cel określa niektóre cechy czujników, takie jak odległość robocza lub częstotliwość przełączania, i sprawia, że specyfikacje czujników są porównywalne. Dane techniczne czujnika można wykorzystać, jeśli element tłumiący używany w rzeczywistym zastosowaniu odpowiada materiałowi i wymiarom standardowego celu. Jeżeli rzeczywiście zastosowany element tłumiący jest większy, zwykle nie zwiększa to odległości roboczej. Jeśli użyty element tłumiący jest mniejszy od standardowego celu, określonego normą EN 60947-5-2, lub składa się z innego materiału, zmniejsza to odległość roboczą. W związku z tym położenie czujnika i elementu tłumiącego musi być regulowane indywidualnie, tak aby uwzględniany był zmniejszony dystans roboczy.
Actuation by Axial Approach
For axial actuation of the sensor, the following operating distances are determined using a standard target.
Standardowy cel to kwadrat o grubości 1 mm ze stali typu FE 360 (ST37) o gładkiej powierzchni.
Cel ma jedną z następujących długości boków:
- 1 x średnica wewnętrznego okręgu powierzchni wykrywania
- 3 x sn
Większa wartość (tzn. większa powierzchnia) ma zastosowanie we wszystkich przypadkach.
Przykład 1
Odległość robocza czujnika M18
5 mm
3 x odległość robocza = 15 mm < średnica czujnika
- Element tłumiący musi zatem mieć wymiary 18 x 18 x 1 mm.
Przykład 2
Odległość robocza czujnika M18
8 mm
3 x odległość robocza = 24 mm > średnica czujnika
- Element tłumiący musi zatem mieć wymiary 24 x 24 x 1 mm.
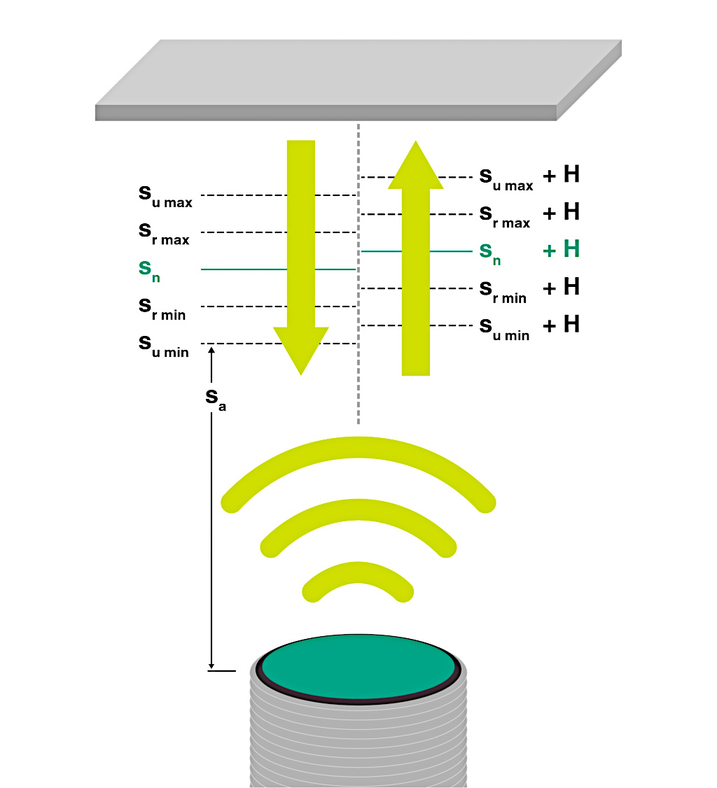
Odległość robocza („Znamionowa odległość robocza”) sn
Odległość robocza snlub zgodnie z normą EN 60947-2-5 „znamionowa odległość robocza” jest konwencjonalną zmienną, która służy do określania odległości roboczej. Ten rodzaj odległości roboczej nie uwzględnia tolerancji produkcyjnych ani zmian spowodowanych czynnikami zewnętrznymi, takimi jak napięcie i temperatura.
Skuteczna odległość robocza sr
Skuteczna odległość robocza sr w przypadku pojedynczego czujnika mierzona w określonych warunkach:
- Temperatura otoczenia +23 do ±5°C
- Napięcie mieści się w zakresie napięcia roboczego
- W określonych warunkach montażu
0,9 sn ≤ sr ≤ 1,1 sn
Użytkowa odległość robocza su
Użytkowa odległość robocza su w przypadku pojedynczego czujnika mierzona w określonych warunkach:
- Zakres temperatury otoczenia od -25°C do 70°C.
- Napięcie zasilania między 85% a 110% znamionowego napięcia roboczego
0,9 sr ≤ su ≤ 1,1 sr
Gwarantowana odległość robocza sa
Gwarantowana odległość robocza sa odległość od powierzchni wykrywania, w której uruchomienie czujnika jest zapewnione w określonych warunkach:
0 < sa ≤ 0,81 sn
Dokładność powtarzania R
Dokładność powtarzania R jest zmianą skutecznej odległości roboczej s.r, mierzone w następujących warunkach:
- Okres: 8 godzin
- Temperatura obudowy: +23°C ± 5°C
- Wilgotność względna: dowolna
- Napięcie zasilania: Ue ± 5%; lub napięcie: dowolne ± 5% w zakresie znamionowego napięcia roboczego
R ≤ 0,1 sr
Histereza H
Histereza H oznacza odległość między punktami przełączania (SP), gdy standardowy cel zbliża się do czujnika i ponownie odsuwa się od niego. Histereza jest określona w odniesieniu do efektywnej odległości roboczej sr. Odległość ta jest mierzona w temperaturze otoczenia +23°C ± 5°C i przy znamionowym napięciu roboczym.
H ≤ 0,2 sr
Typowa histereza czujników pojemnościowych Pepperl+Fuchs mieści się w zakresie od 5% do 10% efektywnej odległości roboczej sr.
Stan „bezpieczne wyłączenie”
Czujnik może być wyłączony w sposób bezpieczny, jeśli odległość standardowego celu od powierzchni wykrywania jest co najmniej trzykrotnie większa od odległości roboczej s.n .
Actuation by Radial Approach
In addition to axial approach of the standard target, there is radial (lateral) approach. If the standard target is moved laterally into the area of the sensor sensing face, the result is a different operating distance (s) with a different switch point (SP) and correspondingly different hysteresis (H). This depends on the axial distance. This relationship is described by the response curve.
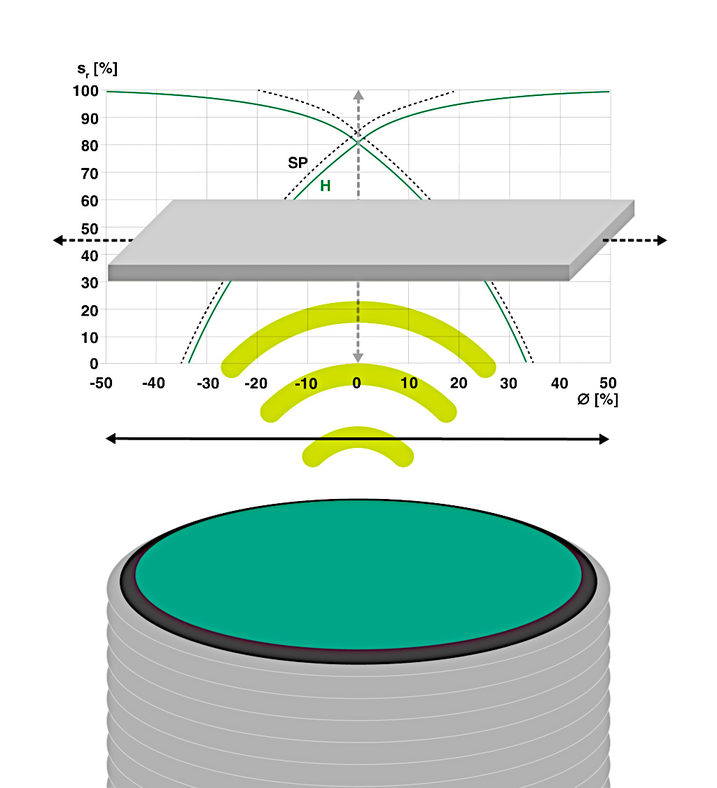
Czujnik przełącza się przy odległości osiowej 0 przy około 15% pokrycia aktywnej powierzchni. Przy 0,5* skutecznej odległości roboczej (sr), powierzchnia czujnika musi być już pokryta w około 35%. Przy odległości osiowej 0,8 * sr, zakres musi wynosić 50%. Przy 1* sr, czujnik musi być całkowicie zakryty, aby mógł się przełączyć.
Damping Elements in Applications
Size and material in real applications usually deviate from the normative specifications for the standard target. In practice, of course, damping elements that have different dimensions and consist of different materials than the standard target are used. The two factors can be taken into account accordingly.
Rozmiar odbiega od celu standardowego
Czujniki pojemnościowe są często używane do sprawdzania części maszyny. Takie części maszyny rzadko mają taki sam rozmiar i kształt jak standardowy cel, do którego odnoszą się dane techniczne czujnika. Odległość robocza zależy w szczególności od wielkości metalu użytego do tłumienia czujnika. Zazwyczaj odległość robocza nie zwiększa się, jeśli obiekty są większe niż określone przez standardowy cel. Jeśli jednak obiekty stają się mniejsze niż standardowy cel, to odległość robocza ulega znacznemu zmniejszeniu. Jeśli rozmiar obiektu, którego dotyczy zapytanie, różni się od rozmiaru obiektu standardowego, zaleca się sprawdzenie odległości roboczej wybranego czujnika.
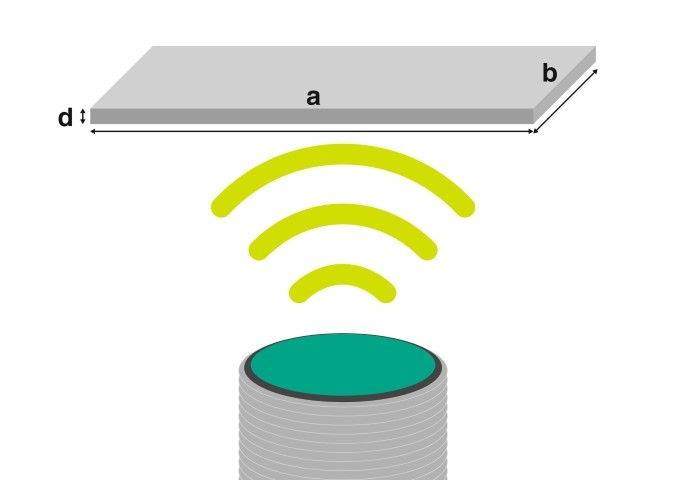
Możliwe odchylenia zmiennych
Obszar obiektu a * b jest mniejszy niż standardowy obszar docelowy
► zasięg wykrywania staje się mniejszy
Obszar obiektu a * b jest większy niż standardowy obszar docelowy
► brak efektu
Materiał odbiega od celu standardowego
Współczynnik redukcji
Oprócz wymiarów, skład materiału elementu tłumiącego odgrywa szczególnie ważną rolę. Jest to określone przez współczynnik redukcji. Współczynnik redukcji wskazuje współczynnik, o który odległość robocza czujników indukcyjnych różni się od długości roboczej stalowych czujników FE 360 (St37) z powodu różnych materiałów.
Im mniejszy współczynnik redukcji, tym mniejsza odległość robocza dla danego materiału. Ponieważ współczynnik redukcji w pojemnościowym czujniku zbliżeniowym zależy od takich czynników, jak obudowa i materiał ekranujący, może się on różnić w zależności od typu. Poszczególne wartości mają kluczowe znaczenie dla każdego czujnika.
Stałe materiałowe i odległości robocze
Odległość robocza sn czujnika pojemnościowego jest wstępnie ustawiona fabrycznie przy użyciu uziemionego metalowego obiektu o określonej wielkości w określonych warunkach montażu (wpuszczany, niewpuszczany). Wstępnie ustawiona odległość robocza jest zmniejszona w przypadku obiektów, w których występują odchylenia materiałów, które mają być wykrywane w identycznych warunkach.
Uwaga: Jeśli metalowy przedmiot nie jest uziemiony, rozmiar obiektu metalowego staje się kluczowym czynnikiem, który decyduje, czy metal jest wykrywany.
W poniższej tabeli przedstawiono przegląd rozmiarów stałych dielektrycznych zależnych od materiału i oczekiwanych współczynników redukcji do znamionowej odległości roboczej.
| Materiał | Liczba dielektryczna r | Współczynnik redukcji |
|---|---|---|
| Uziemiona stal standardowa FE 360 (St37) ma zastosowanie do wszystkich metali | > 100 do 10 000 | 1 |
| Woda | 80 | 1 |
| Alkohol | 22 | 0,75 |
| Szkło | 5 do 16 | 0,6 |
| Ceramika | 4 do 7 | 0,5 |
| PVC | 2,3 do 3,4 | 0,45 |
| Drewno (suche) | 3 do 7 | 0,3 |
| Olej | 2,6 do 2,9 | 0,28 |
| Papier (suchy) | 1,6 do 2,6 | 0,25 |
| Powietrze | 1 | 0 |
Źródło: Pepperl+Fuchs



Pepperl+Fuchs Sp. z o.o.
ul. Owsiana 12
03-825 Warszawa
Polska
NIP: 522-28-27-777
 +48 22 256 9770
+48 22 256 9770
Pepperl+Fuchs jest czołową firmą konstruującą i produkującą czujniki elektroniczne oraz inne komponenty dla globalnego rynku automatyki. Innowacyjność, wysoka jakość oraz stały rozwój firmy powodują, iż z sukcesem jesteśmy obecni na rynku od ponad 70 lat. Pepperl+Fuchs zatrudnia ponad 6300 pracowników na całym świecie i ma swoje zakłady produkcyjne w Niemczech, USA, Singapurze, na Węgrzech, w Indonezji i Wietnamie. Większość z nich posiada certyfikat ISO 9001.